高精度的拾放应用可以使生产线变得更高效、更可靠。但是目前,拾放机器人作为从机器本身独立出来的单元而工作,这限制了它们的生产率。通过将机器人控制完全集成到其自动化系统中,并推出新的软件解决方案,贝加莱现在正在改变这种局面。

“拾放应用拥有一个很大的优势,”贝加莱集成机器人产品经理Sebastian Brandstetter解释道。“机器人每天24小时不断重复执行相同的精确运动,且具有相同的精度水平。”这对机器操作员意味着什么呢?
- 提高效率
- 减少浪费
- 缓解疲劳
差错更少
“许多典型的拾放操作已经实现自动化,”Brandstetter说道。尽管如此,仍然存在无数的手动工位,人工在其中执行单调的任务,例如将产品放入盒子或分拣出有缺陷的物品。这有两个主要缺点:首先,找到愿意从事这项工作的人正在变得越来越困难;其次,单调的工作意味着人迟早会犯错。这就是为什么拾放解决方案非常适合在这些情况下使用的原因。
“但是,”Brandstetter说道,“拾放系统的实施比你想象的要复杂。”仅对机器人运动进行编程是不够的。应用程序还必须考虑许多其它重要因素:
- 每个机器人的动作
- 机器人与输送机构之间的协调
- 与机器视觉系统相配合
- 机器过程本身
物流挑战
“归根结底,拾放基本上是物流问题,”Brandstetter说道。你需要尽可能高效地将物品从A处输送到B处。这听上去可能很简单,但是它却依赖于一些非常复杂的计算和相应的编程。
“因此,我们在mapp技术解决方案中添加了一个专门的新组件,”Brandstetter说道。要设置一个应用程序,只要描述所需的过程即可。这可以像“将所有橙色产品拾起并放入第一个盒子”一样简单。智能的mapp组件会处理其余部分。
智能软件模块
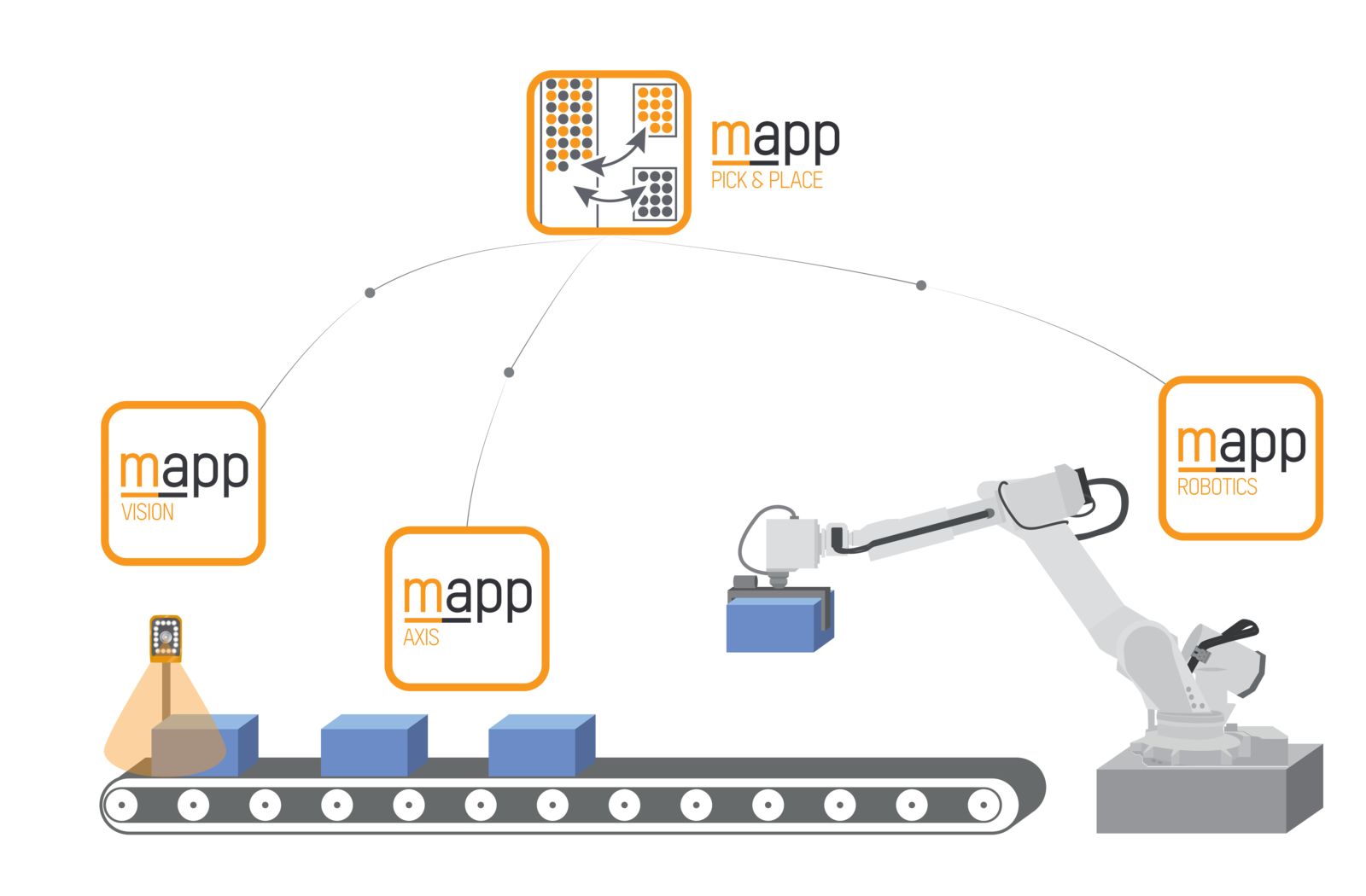
“为了使之成为可能,我们对许多不同的软件模块进行了编程,这些模块在后台自动链接在一起,以达到所需的结果。”它们之间的接口被称为mapp Link,还可以将它们连接到使用的任何其它mapp组件,例如用于机器视觉的mapp Vision,用于机器人控制的mapp Robotics,亦或用于单轴运动控制的mapp Axis。
“所有组件皆可自动进行相互通信是mapp技术的巨大优势,”Brandstetter说道。由于用户不必编写任何代码,因此他们有更多时间专注于他们的主要挑战:对机器过程本身进行优化。
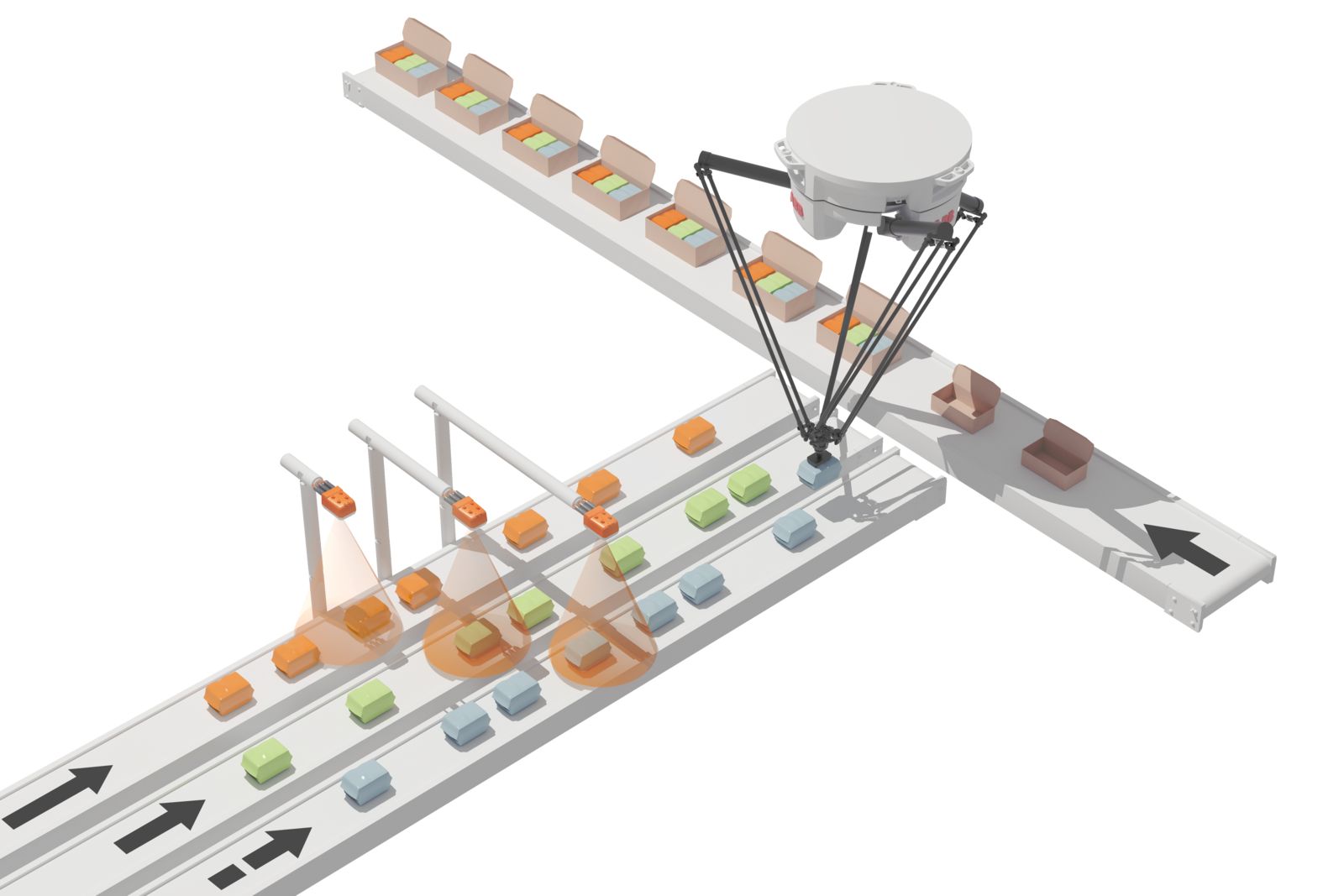
继续以橙色产品为例,mapp Pick&Place的工作方式如下:
- 机器视觉相机检测到橙色产品
- 它的位置通过mapp Link实时发送到机器人
- mapp Robotics计算最佳路径
- 机器人拾起产品并将其放入盒子
配置而非编程
“这一基本概念还可以扩展到更复杂的应用程序,”Brandstetter指出道。盒子可能沿着传送带移动,产品也可能以特定的排列方式放入盒子。“即使在诸如此类更高级的情况下,也适用于相同的原则:创建应用程序的人只需要配置他们想要的功能即可 – 无需编程。”
mapp Pick&Place非常灵活,它还可以与像ACOPOStrak这样的智能轨道系统一起使用。不仅如此,应用程序中可以使用多少机器人也没有限制。特别是在高速分拣应用中,拥有一系列机器人往往对最大限度提高产出非常有帮助。除了Delta机器人之外,还可以使用多关节或SCARA机器人。
选择权留给用户
“解决拾放任务有多种可能的物流策略,”Brandstetter解释道。“而且,在创建mapp Pick&Place时,我们就考虑到了这些因素。”用户可以在多种策略之间进行选择,例如:
- 先进先出(FIFO)
- 优先处理某些任务或产品
- 拾取时间尽可能最快
- 运动轨迹节能
- 运动轨迹可最大限度减少机械磨损
这些选项使过程可以针对任何可能的情况得到优化。通过简化机器人和拾放操作的实施,mapp Pick&Place大大降低了将机器人集成到机器过程中的投资风险。机器人和机器其余部分的精确同步也对生产率带来了极大提升。

贝加莱是全球唯一的控制及机器人技术单一供应商。其母公司ABB的机器人完全集成在贝加莱自动化系统中。客户将从机器人和机器控制之间前所未有的同步精度中受益。开发、诊断和维护都只需要一个控制器和一个工程系统。