Las impresoras 3D son muy prometedoras en la construcción de edificios, puesto que permiten imprimir componentes prefabricados que luego se transportan a la obra. Un proyecto de investigación de la Universidad Técnica de Liberec, en la República Checa, tiene como objetivo crear un robot móvil que pueda imprimir edificios directamente "in situ". El equipo utiliza controles, servoaccionamientos, HMI y soluciones de software de B&R para controlar el sofisticado cabezal de impresión del innovador robot.
Las primeras impresoras 3D utilizadas en el sector de la arquitectura desempeñaban un papel de asistencia en el proceso de diseño: producían modelos de plástico para exposiciones y presentaciones. Ahora, unas impresoras de mayor tamaño están empezando a fabricar componentes de hormigón que se utilizan en la construcción de edificios reales. Sin embargo, en la Universidad Técnica de Liberec (TUL), en la República Checa, un equipo de investigadores ya está preparando el siguiente paso en esta evolución: robots móviles que harán la impresión directamente en la obra.
Ilusionantes posibilidades con algunas limitaciones
La impresión 3D promete ofrecer unas interesantes ventajas en el campo de la construcción de edificios. Los componentes de los edificios ahora se imprimen a partir de una mezcla de hormigón y materiales de refuerzo. Las nuevas posibilidades de diseño están inspirando la creatividad de los arquitectos, y la producción de los componentes es considerablemente más económica. Al no requerir el vasto encofrado necesario para las estructuras monolíticas convencionales, también generan menos residuos.
No obstante, por muy ilusionantes que resulten estos métodos experimentales, el estado actual de la técnica sigue presentando una serie de inconvenientes. Los componentes se fabrican en una nave de producción y luego deben transportarse a la obra. Los vehículos utilizados para el transporte limitan las dimensiones de los componentes y generan unos considerables costes logísticos y un impacto medioambiental. Los sistemas actuales también imprimen solo los elementos verticales del edificio, mientras que los forjados horizontales para los suelos y los techos se crean con métodos convencionales.
Edificios enteros impresos directamente "in situ"
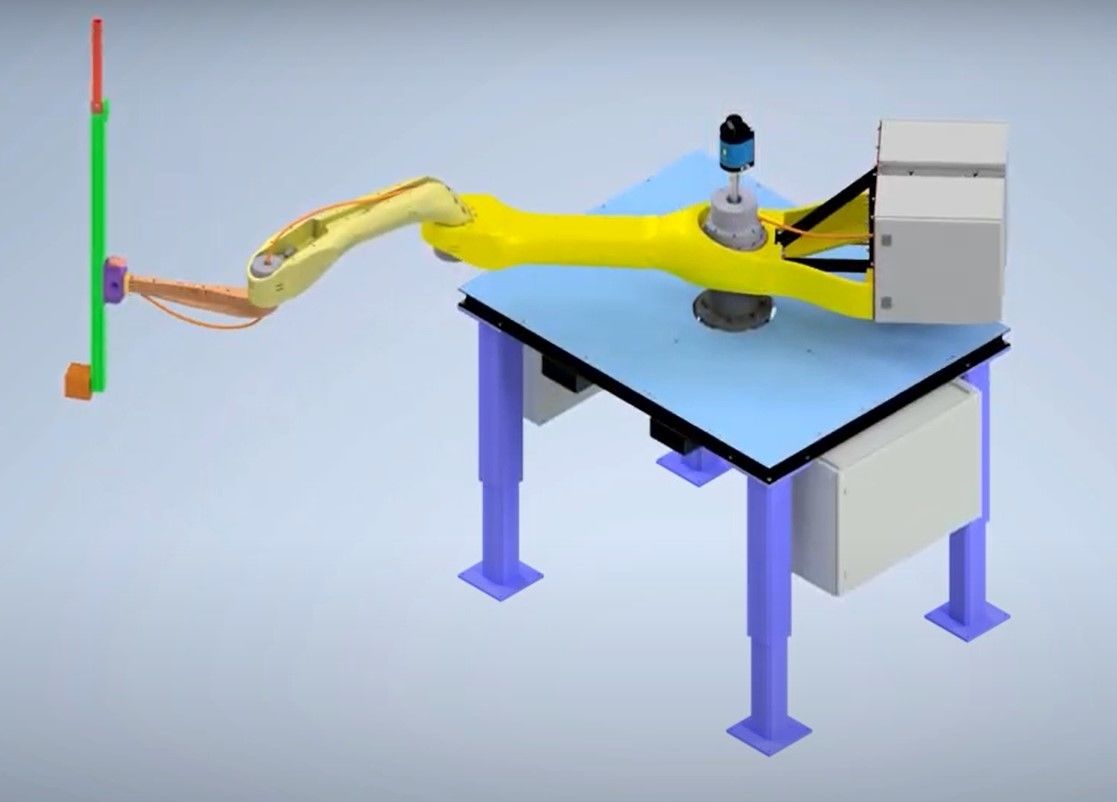
El equipo de investigación de la TUL pretende superar estos inconvenientes e imprimir edificios enteros de varios pisos -suelos y techos incluidos- directamente en la obra. El robot móvil de impresión 3D se llamará Printing Mantis, debido al parecido del brazo del robot con las patas delanteras alargadas del insecto mantis religiosa. El proyecto se lleva a cabo en colaboración con el Instituto de Teoría de la Información y Automatización de la Academia de Ciencias de la República Checa y el Instituto Klokner de la Universidad Técnica de Praga, y se utilizarán controles, servoaccionamientos, HMI y software de B&R.
Jiří Suchomel, de la Facultad de Artes y Arquitectura de la TUL, pronostica que la impresión "in situ" con la Printing Mantis ofrecerá a los arquitectos una creatividad aún mayor para implementar formas complejas con una precisión sin precedentes de 2-3 milímetros. El robot montará "in situ" edificios de varios pisos como si fueran grandes piezas de Lego. "Los forjados horizontales se imprimirán en el suelo y se levantarán hacia su posición, mientras que los muros verticales se imprimirán directamente en su ubicación final", describe Suchomel. "Todo directamente in situ".
La producción de cemento tiene un importante impacto medioambiental; además, el suministro de los áridos y la grava que se añaden para fabricar el hormigón es limitado. "Por eso queremos construir unas estructuras de hormigón ligeras y de paredes finas con refuerzos no convencionales", explica Suchomel. "Ello reducirá considerablemente el consumo de material".
No solo se trata de cambiar el plástico por el hormigón
Las impresoras 3D con las que la mayoría de nosotros estamos familiarizados utilizan materiales en polvo y plásticos. Por otro lado, adaptar el diseño para imprimir una casa implica bastante más que la simple sustitución de estos materiales por hormigón convencional. La mezcla de cemento por sí sola supone un enorme desafío. Debe ser lo suficientemente flexible como para trabajar, pero también debe solidificarse lo bastante rápido como para soportar las capas posteriores. El hormigón ordinario se endurece durante 28 días, pero la estructura impresa debe ser capaz de sostenerse inmediatamente.
Otra dificultad importante es dotar al robot de la capacidad de imprimir paredes con prácticamente cualquier curvatura, incluidos los puntos de inflexión, así como de implementar ángulos agudos e interrupciones. "Esto es importante para que podamos dar a los arquitectos la máxima libertad", afirma uno de los principales diseñadores del Con4Bot, el profesor titular del Instituto de Mecatrónica e Ingeniería Informática de la TUL, Václav Záda. Gracias al diseño del Con4Bot, cuando el efector final deja de imprimir brevemente, por ejemplo para dejar espacio para una puerta o ventana, el resto del robot puede seguir moviéndose. "El robot tiene un gran tamaño y puede mantener su considerable energía cinética", dice Záda, "y eso es algo que otras máquinas no pueden hacer".
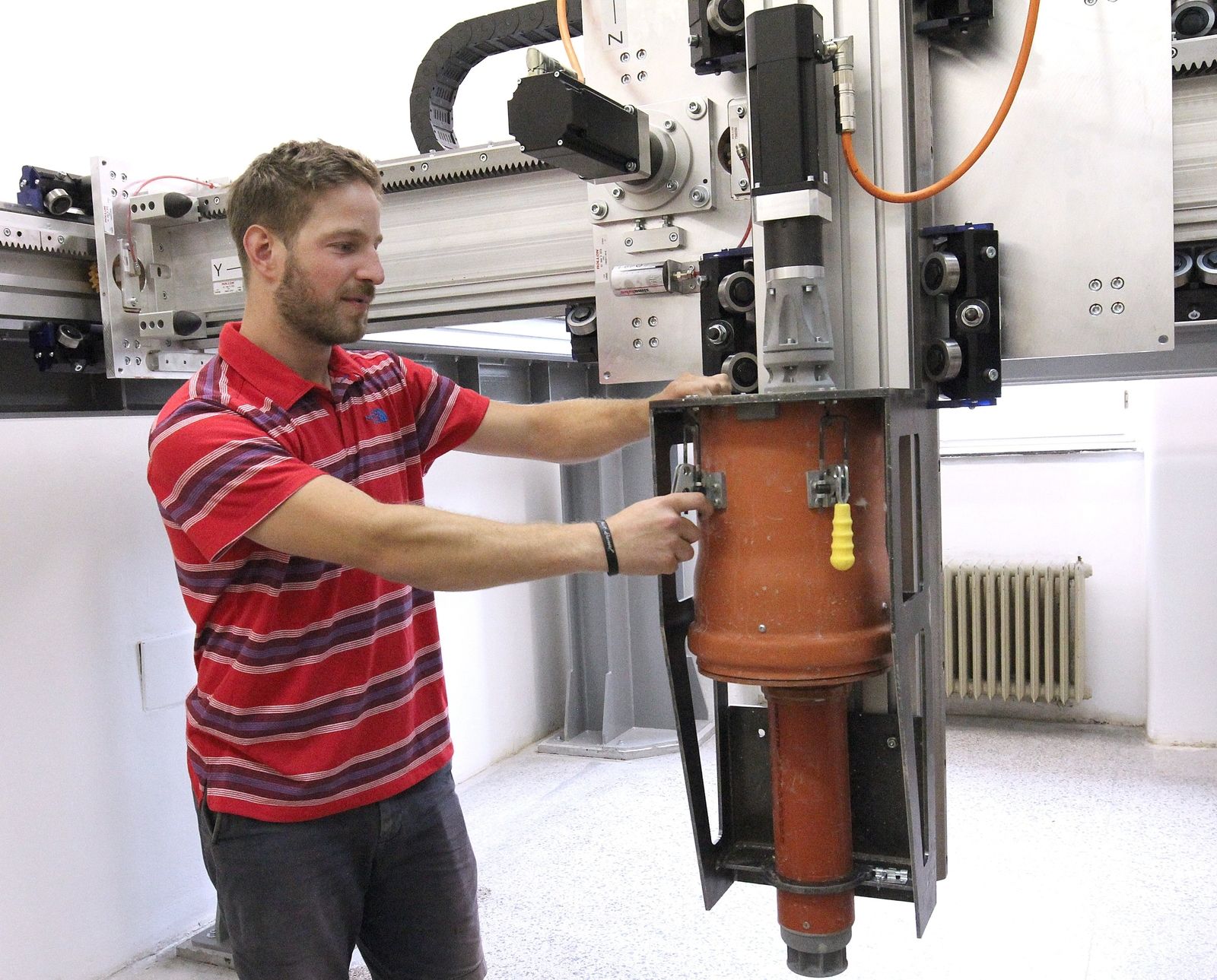
Cuando esté terminada, la Printing Mantis será un brazo robótico giratorio y deslizante con un alcance horizontal de hasta 5,6 metros y un alcance vertical de 3,3 metros. El proyecto se lleva a cabo mediante dos configuraciones de prueba. La primera configuración es un robot SCARA. Actualmente se está probando a escala 1:4, y la versión a escala real se transportará posteriormente con un camión de obras estándar. La segunda configuración es un robot cartesiano en el Instituto Klokner de Praga, donde los investigadores están probando y desarrollando el cabezal de impresión junto con diferentes mezclas de materiales de construcción.
En la I+D moderna, la escalabilidad es vital
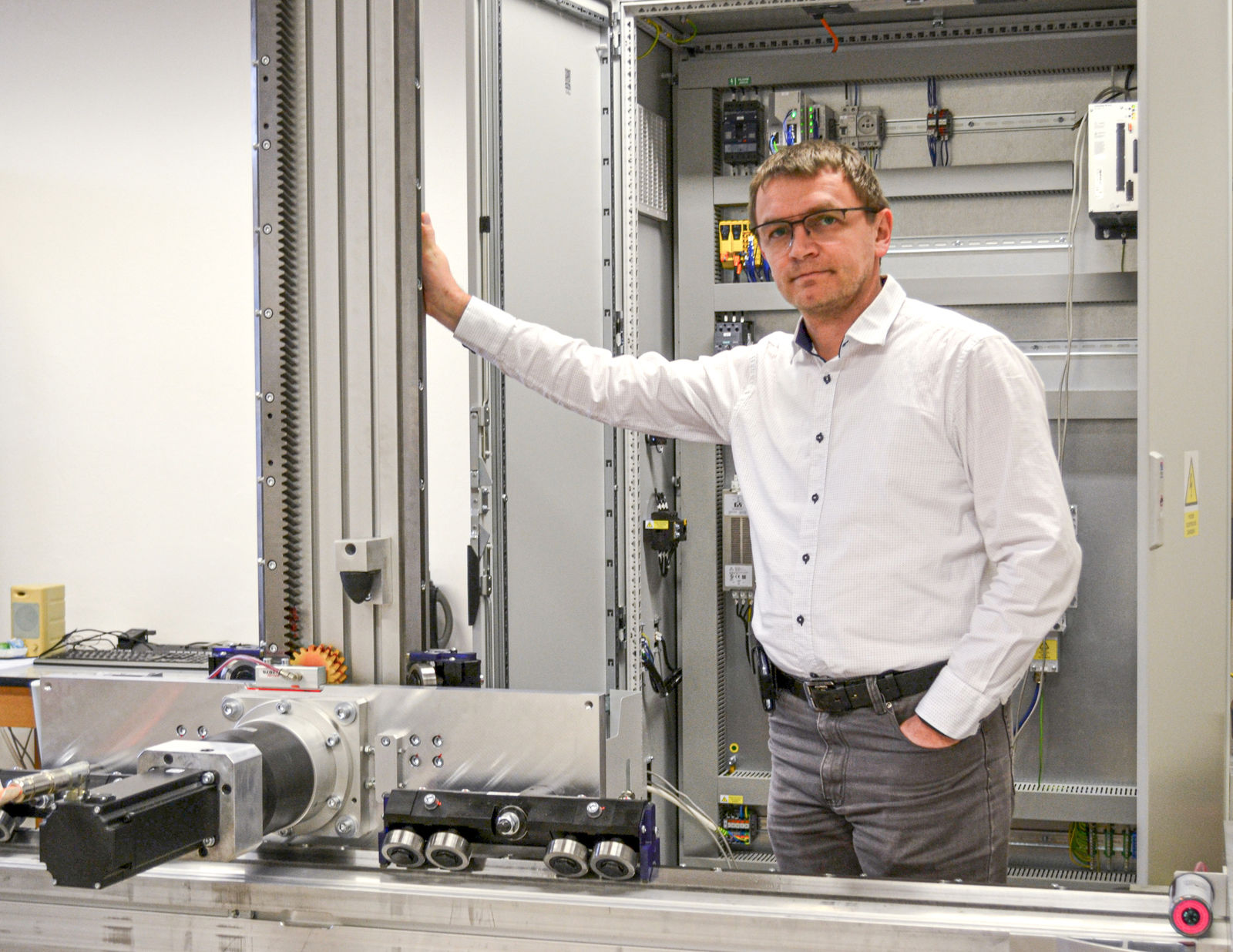
Tras una década de cooperación con B&R, el equipo de investigación sabía que los componentes de automatización ofrecerían no solo el rendimiento necesario, sino también la escalabilidad para crecer junto con el robot en futuras fases de desarrollo e implementación. "Hemos creado una solución de automatización que puede afrontar cualquier nueva necesidad que surja en el futuro", comenta el ingeniero de B&R Tomáš Kohout.
El servoaccionamiento incluye ejes con encoders multivuelta absolutos, servomotores, un sistema de control modular y funciones de seguridad avanzadas. "El sistema de control de movimiento integrado de B&R facilitó el trabajo con la solución, tanto para los diseñadores como para los futuros operarios", afirma Leoš Beran, del Instituto de Mecatrónica e Ingeniería Informática de la TUL. "La solución es excepcionalmente escalable para el futuro, lo que es especialmente importante para un proyecto de investigación de vanguardia como este".

Programación eficiente, funcionamiento flexible
El efector final del cabezal de impresión del robot se maneja con un sistema de control de B&R. El núcleo del software de impresión 3D se basa en componentes CNC estándar de B&R. Además, el kit de herramientas con tecnología mapp de B&R facilitó unos componentes de software preconfigurados que evitaron que el equipo tuviera que programar funciones básicas, tales como la gestión de recetas o de usuarios.
El software de control se ejecuta en un potente PC industrial de la serie Automation PC de B&R. "Además del software de control, el Automation PC también ejecutará la aplicación de HMI basada en la web", comenta Kohout. La aplicación de HMI se muestra en un Automation Panel 5000 montado en un brazo articulado con elementos operativos personalizados. "La HMI de gama alta ofrece un alto grado de flexibilidad y ergonomía de control", señala Kohout, "y la aplicación de HMI basada en la web puede consultarse con la misma facilidad en un PC, un smartphone o una tablet".

Con todas las prestaciones para imprimir los edificios del futuro
Queda por ver cuándo y dónde creará la Printing Mantis su primer edificio de varios pisos "in situ". Entre otras cosas, esto depende del progreso de la normativa referente a la construcción de estructuras impresas. Sin embargo, una cosa es segura: con B&R como socio de automatización, el equipo de investigación puede acceder a una amplia cartera de soluciones flexibles y escalables y puede adaptar, de forma rápida y sencilla, la Printing Mantis a cualquier dificultad que surja al imprimir los edificios del futuro.
 | Leoš Beran Universidad Técnica de Liberec, Instituto de Mecatrónica e Ingeniería Informática "La solución es excepcionalmente escalable para el futuro, lo que es especialmente importante para un proyecto de investigación de vanguardia como este". |
El proyecto 3D Star de la Universidad Técnica de Liberec (CZ.02.1.01 / 0.0 / 0.0 / 16_025 / 0007424) recibe financiación del Programa Operativo "Investigación, Desarrollo y Educación", que aplica la financiación de la Unión Europea para hacer frente a los principales retos de la investigación y la educación, incluidas las medidas para ayudar a la investigación checa a alcanzar la excelencia internacional. |