8KS | b | c | d | . | ee | nnn | ff | gg | - | h | ||||||||||||||||
Kühlart / Bauform | ||||||||||||||||||||||||||
Baugröße | ||||||||||||||||||||||||||
Baulänge | ||||||||||||||||||||||||||
Motorgebersystem | ||||||||||||||||||||||||||
Nenndrehzahl | ||||||||||||||||||||||||||
Motoroptionen | ||||||||||||||||||||||||||
Sondermotoroptionen | ||||||||||||||||||||||||||
Motorversion | ||||||||||||||||||||||||||
Bestellschlüssel geben nur in Ausnahmefällen Aufschluss über die möglichen Kombinationen.
Weitere Informationen
Synchronmotoren 8KS
Allgemeine Motordaten 8KS
Bestellschlüssel 8KS
Kühlart/Bauform (b)
Kühlart/Bauform (b)
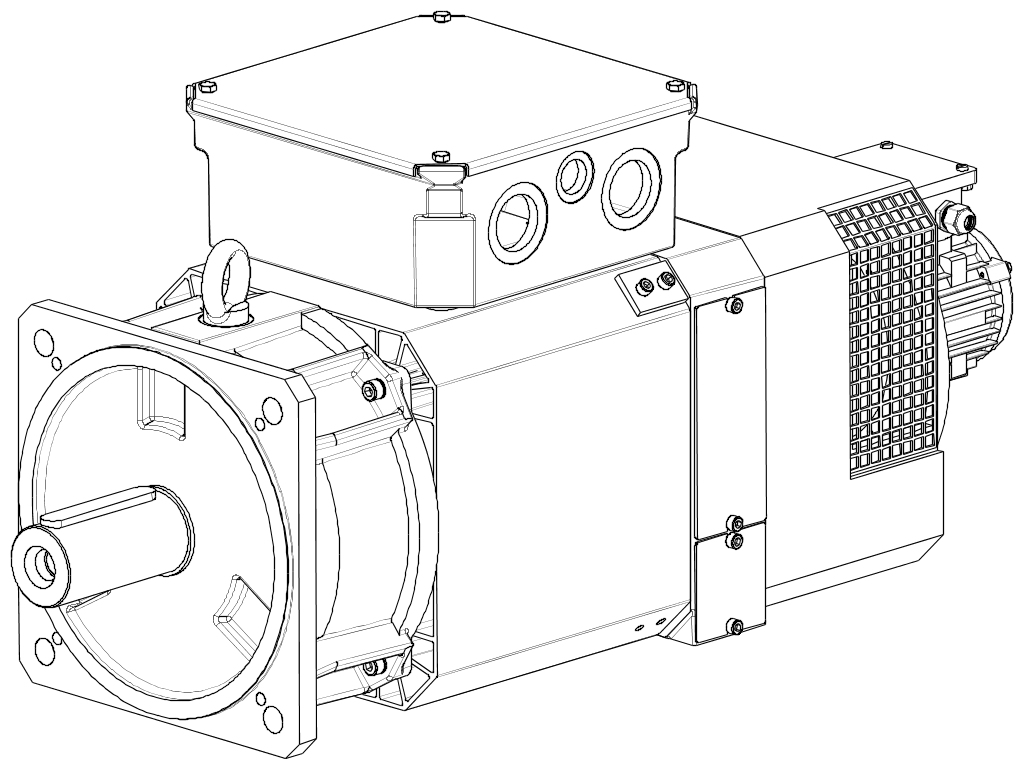
Drehstrom-Synchronmotoren 8KS sind in den Kühlarten 8KSC, 8KSD, 8KSJ, 8KSL und 8KSM erhältlich.
Typ | Kühlart (b) | Anbaurichtung Kühleinheit | verfügbare Montagearten |
|---|---|---|---|
8KSC | lüftergekühlt | radial links oder rechts | Flansch, Fuß B-Seite |
8KSD | lüftergekühlt | radial links oder rechts | Flansch, Fuß A- und B-Seite |
8KSJ | wassergekühlt | rechts | Flansch, Fuß B-Seite |
8KSL | lüftergekühlt | axial | Flansch, Fuß B-Seite |
8KSM | lüftergekühlt | axial | Flansch, Fuß A- und B-Seite |
 | Kühlart 8KSC ist fremdgekühlt und weist einen auf der Seite (links oder rechts) angebauten Radiallüfter auf. Der Motor wird mit dem Anbauflansch, der gleichzeitig auch als Kühlfläche dient, sowie an Montagefüßen im Bereich des B-Lagers montiert. Kühlart 8KSD basiert auf Motoren der Kühlart 8KSC und weist zusätzliche Montagefüße im Bereich des A-Lagers auf. |
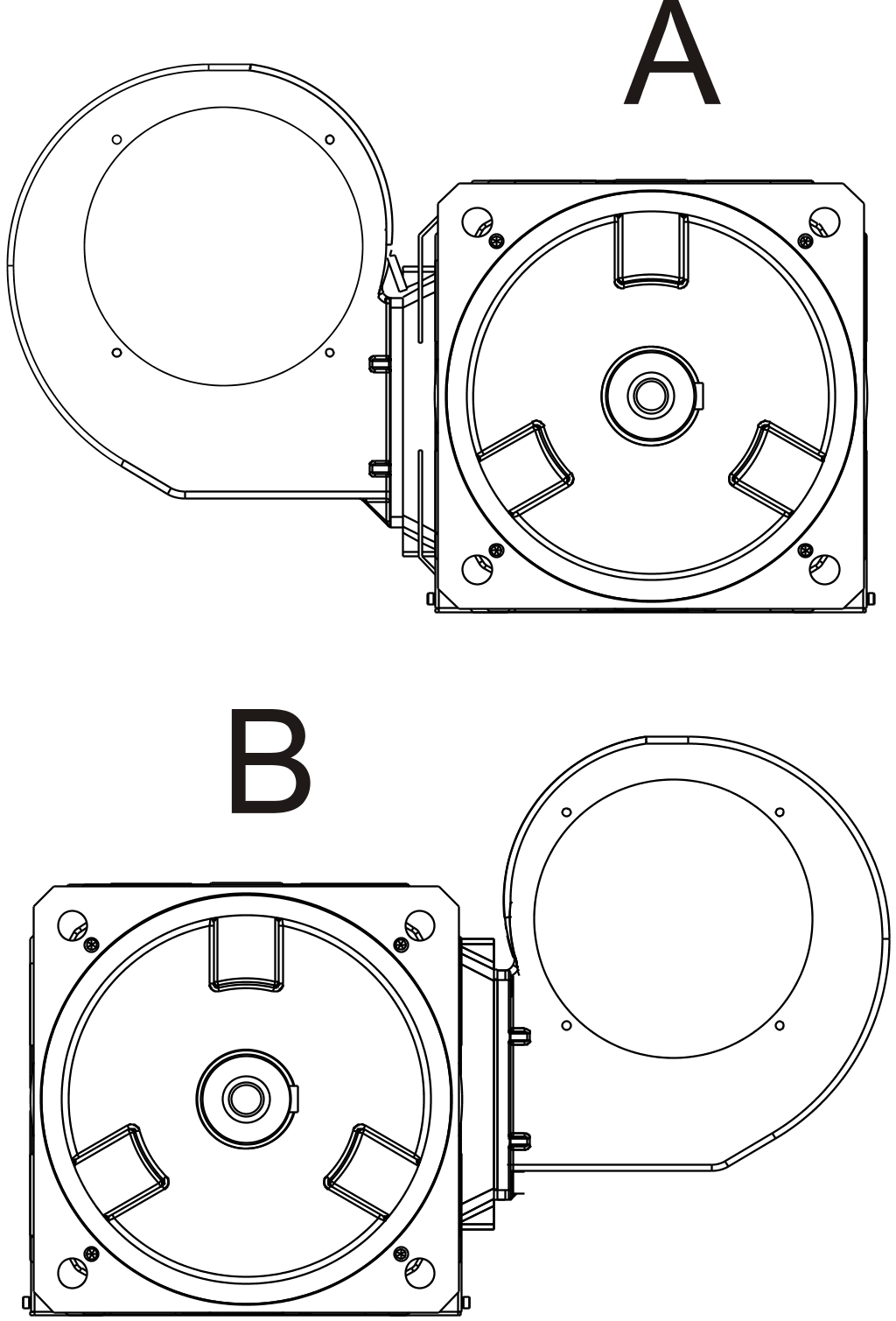
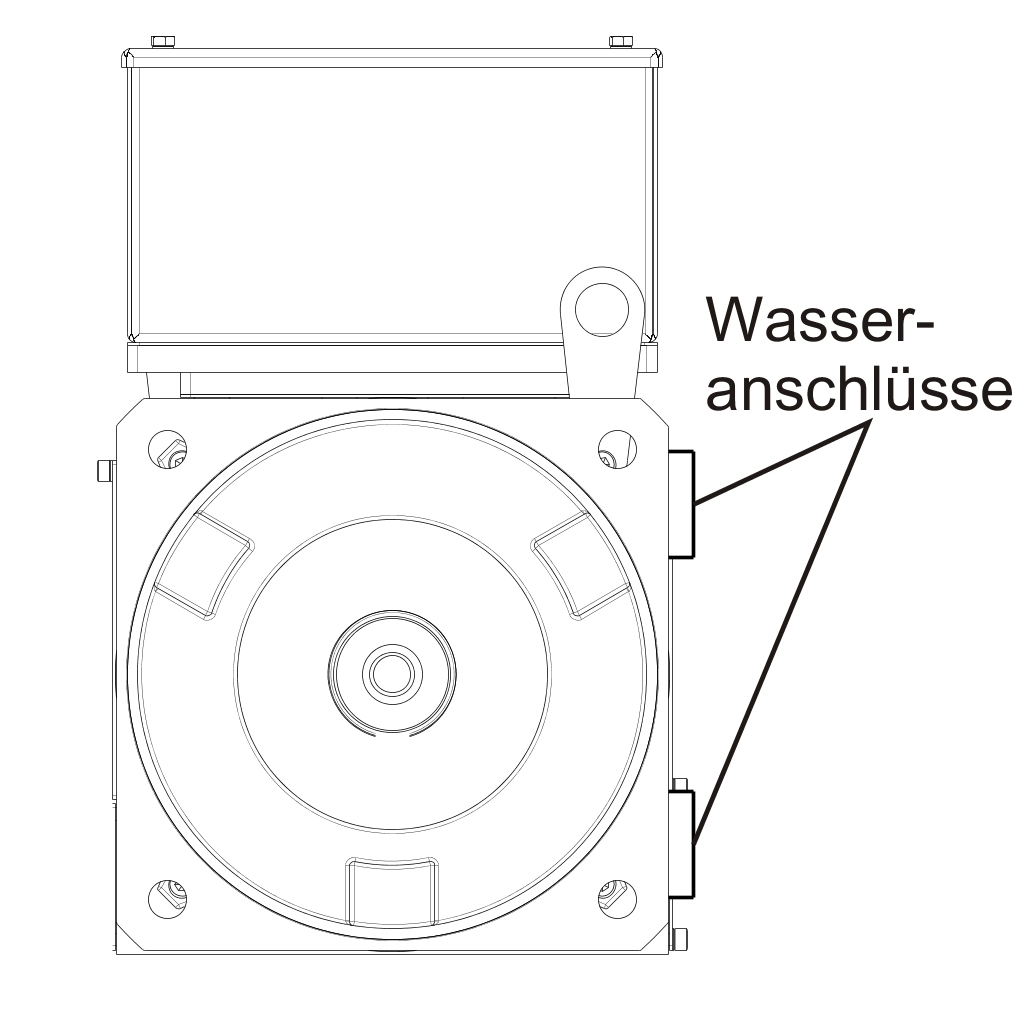 | Kühlart 8KSJ ist fremdgekühlt und weist Kühlwasseranschlüsse auf. Der Motor wird mit dem Anbauflansch, der gleichzeitig auch als Kühlfläche dient, sowie an Montagefüßen im Bereich des B-Lagers montiert. Die Fußmontage auf der A-Seite ist bei dieser Kühlart konstruktionsbedingt nicht möglich! Baugröße 9 des 8KSJ verfügt über zwei unabhängige Kühlkreise. Die Anschlussrichtung der Baugröße 8 des 8KSJ ist immer rechts. Baugröße 9 muss immer beidseitig angeschlossen werden. |
 | Kühlart 8KSL ist fremdgekühlt und weist einen auf der Rückseite des Motors angebauten Axiallüfter auf. Der Motor wird mit dem Anbauflansch, der gleichzeitig auch als Kühlfläche dient, sowie an Montagefüßen im Bereich des B-Lagers montiert. |
Baugröße (c)
Baugröße (c)
Die Motoren der Baureihe 8KS sind je nach Bauart in Baugröße 8 bzw. 8 und 9 erhältlich. Die verschiedenen Baugrößen werden durch eine Ziffer (c) in der Bestellbezeichnung unterschieden. Je größer diese Ziffer, desto größer sind die Flanschabmessungen und Leistungsdaten des jeweiligen Motors.
Kühlart | Verfügbare Baugrößen | |
|---|---|---|
8 | 9 | |
C | Ja | Ja |
D | Ja | -- |
J | Ja | Ja |
L | Ja | Ja |
M | Ja | --- |
Baulänge (d)
Baulänge (d)
Die Drehstrom-Synchronmotoren 8KS sind in vier verschiedenen Baulängen erhältlich. Die verschiedenen Baulängen werden durch eine Ziffer (d) in der Bestellbezeichnung unterschieden.
Baulänge | Verfügbare Baugrößen | |
|---|---|---|
8 | 9 | |
2 | Ja | Ja |
4 | Ja | Ja |
5 | Ja | Ja |
6 | Ja | Ja |
Gebersysteme (ee)
Gebersysteme (ee)
Resolver
In den Servomotoren 8KS werden Resolver des Typs LTN eingesetzt.
Bezeichnung | Bestellcode (ee) |
|---|---|
R0 | |
Genauigkeit | ± 6 Winkelminuten |
Vibration in Betrieb | ≤ 500 m/s² |
Schock in Betrieb | ≤ 1000 m/s² |
Die Schockwerte des Motors müssen jederzeit eingehalten werden!
EnDat 2.1 Geber
EnDat ist ein von der Johannes Heidenhain GmbH entwickelter Standard, der die Vorteile von absoluter und inkrementeller Positionsmessung in sich vereint und darüber hinaus noch einen schreib- und lesbaren Parameterspeicher im Geber zur Verfügung stellt. Durch die absolute Positionsmessung (Absolutposition wird seriell eingelesen) entfällt gewöhnlich die Referenzfahrt. Gegebenenfalls ist ein Multiturn-Geber einzusetzen. Um Kosten zu sparen, kann aber auch ein Singleturn-Geber zusammen mit einem Referenzschalter verwendet werden. In diesem Fall muss allerdings eine Referenzfahrt durchgeführt werden. Das inkrementelle Verfahren ermöglicht die für hochdynamische Antriebe notwendigen kurzen Verzögerungszeiten bei der Lagemessung. Durch die sinusförmigen Inkrementalsignale und die Feinauflösung im EnDat-Modul erreicht man trotz moderater Signalfrequenzen eine sehr hohe Positionsauflösung.
Je nach Anforderung können verschiedene Typen von EnDat 2.1 Gebern zum Einsatz kommen:
Bezeichnung | Bestellcode (ee) | |
|---|---|---|
E6 | E7 | |
Gebertyp | EnDat Singleturn | EnDat Multiturn |
Funktionsprinzip | Optisch | Optisch |
EnDat Protokoll | EnDat 2.1 | EnDat 2.1 |
Auflösung | 2048 Strich | 2048 Strich |
Unterscheidbare | --- | 4096 |
Strichzahl | 2048 | 2048 |
Genauigkeit | ±20“ | ±20“ |
Grenzfrequenz | ≥ 400 kHz (-3 dB) | ≥ 400 kHz (-3 dB) |
Vibration in Betrieb | ≤ 300 m/s² | ≤ 300 m/s² |
Schock in Betrieb | ≤ 2000 m/s² | ≤ 2000 m/s² |
Herstellerbezeichnung | ECN 1313 EnDat01 | EQN 1325 EnDat01 |
EnDat 2.2 Geber - Sicherheitsbezogene Positionsmesssysteme
Im Maschinen - und Anlagenbau gewinnt das Thema Sicherheit immer höhere Bedeutung. Dies spiegelt sich in der Gesetzgebung und in steigenden Sicherheitsstandards in nationalen und internationalen Normen wieder. In erster Linie dienen die hohen Anforderungen dem Personenschutz, zunehmend aber auch dem Schutz von Sachwerten und der Umwelt. Ziel der funktionalen Sicherheit ist die Minimierung oder beseitigen von Gefahren, die sowohl im ungestörten als auch im gestörten Betrieb von Maschinen oder Anlagen entstehen können. Dies wird in erster Linie durch redundante Systeme erreicht. So benötigen bewegte Achsen in sicherheitsgerichteten Anwendungen redundante Positionsinformationen, um entsprechende Sicherheitsfunktionen erfüllen zu können. Zur Gewinnung unabhängiger Positionswerte können unterschiedliche Systemkonfigurationen realisiert werden. Eine Möglichkeit bietet der Einsatz von zwei Messgeräten pro Achse. Aus Kostengründen wird jedoch in vielen Fällen eine Lösung mit nur einem Positionsmessgerät angestrebt. Bis dato wurden dazu analoge Messgeräte mit Sinus/Cosinus-Signalen verwendet. Der Geberhersteller Heidenhain bietet als erster Hersteller mit dem rein seriellen Endat 2.2 Protokoll für sicherheitsbezogene Positionsmesssysteme eine serielle Ein - Geber - Lösung nach IEC 61 508 SIL2. Somit können nun auch in Sicherheitsapplikationen alle Vorteile der seriellen Datenübertragung – wie beispielsweise Kostenoptimierung, Diagnosemöglichkeiten, automatische Inbetriebnahme oder schnelle Positionswertbildung – genutzt werden.
Eine hundertprozentige Fertigungskontrolle sowie zusätzliche Schritte bei der Endprüfung stellen bei Motoren mit Safety-Gebern den Fehlerausschluss, für die Wellen- und Kupplungsanbindung des Drehgebers, gemäß EN ISO 13849-2 sicher.
Aber auch mit D-Gebern sind eine Reihe von Sicherheitsfunktionen bereits möglich.
Informationen zum Thema Einsatzbereich und Vorgehensweise zum Einrichten der verschiedenen Sicherheitsfunktionen entnehmen Sie bitte dem Anwenderhandbuch SafeMOTION (MAACPMSAFEMC-GER) im Downloadbereich der B&R Homepage www.br-automation.com.
Technische Daten
Je nach Anforderung können EnDat 2.2 Geber für Funktionale Sicherheitz in Singleturn oder Multiturn Ausführung zum Einsatz kommen.
Bezeichnung | Bestellcode (ee) | |
|---|---|---|
S0 | S1 | |
Gebertyp | EnDat Singleturn Functional Safety | EnDat Multiturn Functional Safety |
Funktionsprinzip | Optisch | Optisch |
EnDat Protokoll | EnDat 2.2 | EnDat 2.2 |
Positionswerte pro Umdrehung | 33 554 432 (25 bit) | 33 554 432 (25 bit) |
unterscheidebare Umdrehungen | --- | 4096 |
Genauigkeit | ± 20" | ± 20" |
Vibration in Betrieb 10 bis 2000 Hz | ≤ 300 m/s2 (IEC 60 068-2-6) | ≤ 300 m/s2 (IEC 60 068-2-6) |
Schock in Betrieb Dauer 6 ms | ≤ 2000 m/s2 (IEC 60 068-2-27) | ≤ 2000 m/s2 (IEC 60 068-2-27) |
Herstellerbezeichnung | ECN 1325 FS EnDat22 | EQN1337 FS EnDat22 |
Nenndrehzahl (nnn)
Nenndrehzahl (nnn)
Die Drehstrom-Synchronmotoren 8KS sind je nach Baugröße und Baulänge mit verschiedenen Nenndrehzahlen lieferbar:
Motorbaugröße und -baulänge | verfügbare Nenndrehzahlen nN [min-1] | ||||||
|---|---|---|---|---|---|---|---|
1000 | 1100 | 1500 | 1600 | 2000 | 2500 | 3000 | |
8KSC8 | -- | Ja | -- | Ja | Ja | Ja | Ja |
8KSD8 | -- | Ja | -- | Ja | Ja | Ja | Ja |
8KSL8 | -- | Ja | Ja | Ja | Ja | Ja | |
8KSM8 | -- | Ja | -- | Ja | Ja | Ja | Ja |
8KSC92,94 | Ja | -- | Ja | -- | Ja | Ja | Ja |
8KSC95 | Ja | -- | Ja | -- | Ja | Ja | -- |
8KSC96 | Ja | -- | Ja | -- | Ja | -- | -- |
8KSL92,94 | Ja | -- | Ja | -- | Ja | Ja | Ja |
8KSL95 | Ja | -- | Ja | -- | Ja | Ja | -- |
8KSL96 | Ja | -- | Ja | -- | Ja | -- | -- |
Motorbaugröße und -baulänge | verfügbare Nenndrehzahlen nN [min-1] | ||||
|---|---|---|---|---|---|
1000 | 1500 | 2000 | 2500 | 3000 | |
8KSJ82, 84, 85 | Ja | Ja | Ja | Ja | Ja |
8KSJ86 | Ja | Ja | Ja | Ja | -- |
8KSJ92 | Ja | Ja | Ja | Ja | -- |
8KSJ94 | Ja | Ja | Ja | -- | -- |
8KSJ95 | Ja | Ja | -- | -- | -- |
8KSJ96 | Ja | -- | -- | -- | -- |
Ermittlung des Bestellcodes für Motoroptionen (ff)
Der entsprechende Code (ff) für den Bestellschlüssel kann der folgenden Tabelle entnommen werden:
Motoroptionen Kühlart C, D und J (Radiallüfter und Wasserkühlung)
Motoroption | |||||
|---|---|---|---|---|---|
Anschlussrichtung | Wellendichtring | Haltebremse | Wellenende | Anbaurichtung/Anschlussrichtung Kühleinheit | Code für Bestellschlüssel (ff) |
Klemmkasten oben, Kabelabgang 270° (rechts) | nein | nein | glatt | Lüfter links | A0 |
mit Passfeder | Lüfter links | A1 | |||
normal | glatt | Lüfter links | A2 | ||
mit Passfeder | Lüfter links | A3 | |||
nein | glatt | Lüfter/ Wasseranschluss rechts | B0 | ||
mit Passfeder | Lüfter/ Wasseranschluss rechts | B1 | |||
normal | glatt | Lüfter/ Wasseranschluss rechts | B2 | ||
mit Passfeder | Lüfter/ Wasseranschluss rechts | B3 | |||
HINWEIS: Für 8KSJ sind ausschließlich"B" Optionen zu wählen, da sich der Wasseranschluss bei 8KSJ8 immer auf der rechten Seite befindet, und bei Baugröße 8KSJ9 immer beidseitig anzuschließen ist, da zwei Kühlkreisläufe zu versorgen sind.
Motoroptionen Kühlart L und M (Axiallüfter)
Motoroption | |||||
|---|---|---|---|---|---|
Anschlussrichtung | Wellendichtring | Haltebremse | Wellenende | Anbaurichtung/Anschlussrichtung Kühleinheit | Code für Bestellschlüssel (ff) |
Klemmkasten oben, Kabelabgang 270° (rechts) | nein | nein | glatt | axial | C0 |
mit Passfeder | axial | C1 | |||
normal | glatt | axial | C2 | ||
mit Passfeder | axial | C3 | |||
Sondermotoroptionen (gg)
Sondermotoroptionen (gg)
Der entsprechende Code (gg) für den Bestellschlüssel kann der folgenden Tabelle entnommen werden:
Sonderoption | Bestellcode |
|---|---|
keine Sonderoption | 00 |
verstärkte Lagerung | 04 |
Rechteckfilter für Radiallüfter Kühlart C und D | 15 |
Motorversion (h)
Motorversion (h)
Die Motorversion wird automatisch vom Konfigurator vorgegeben und ist aus den technischen Daten ersichtlich.
Bestellbeispiel 1
Bestellbeispiel 1
Für eine Applikation wurde ein lüftergekühlter Drehstrom-Synchronmotor des Typs 8KS der Baugröße 84 ausgewählt. Der Motor soll zusätzlich zum bereits vorhandenen Montagefuß an der B-Seite mit einem Montagefuß an der A-Seite ausgerüstet sein. Die Bezeichnung lautet daher 8KSD. Es wurde ein Singleturn-Geber mit Functional Safety gewählt. Die benötige Drehzahl ist 2500 min-1. Der radial montierte Lüfter soll sich auf der linken Seite des Motors befinden. Es wird keine Bremse benötigt, der Wellenabgang soll eine glatte Welle sein. Der Lüfter soll mit einem Filter ausgerüstet werden, der als Sonderoption erhältlich ist.
Der Code (ee) für das Gebersystem ist S0.
Der Code (nnn) für die Nenndrehzahl von 2500 min-1 ist 025.
Der Optionscode (ff) für lüftergekühlte 8KS Motoren mit dem Lüfter auf der linken Seite ist immer "A". Alle 8KS Motoren sind mit einem Klemmkasten (Position oben, Kabelabgang rechts, das entspricht 270°) ausgestattet. Die Optionen keine Haltebremse und glatte Welle ergeben dann "0", also lautet der Optionscode "A0"
Der Sonderoptionscode (gg) für den Filter (Rechteckfilter) ist 15.
Die Bestellnummer des benötigten Motors lautet daher: 8KSD84.S0025A015-0
Bestellbeispiel 2
Bestellbeispiel 2
Für eine Applikation wurde ein wassergekühlter Drehstrom-Synchronmotor des Typs 8KSJ der Baugröße 92 ausgewählt. Es wurde ein Multiturn-Geber mit Functional Safety gewählt. Die benötige Drehzahl ist 2000 min-1. Es wird keine Bremse benötigt, der Wellenabgang soll eine Welle mit Passfeder sein.
Der Code (ee) für das Gebersystem ist S1.
Der Code (nnn) für die Nenndrehzahl von 2000 min-1 ist 020.
Der Optionscode (ff) für wassergekühlte 8KSJ Motoren ist immer "B". Alle 8KS Motoren sind mit einem Klemmkasten (Position oben, Kabelabgang rechts, das entspricht 270°) ausgestattet. Die Optionen keine Haltebremse und Passfeder ergeben dann "1", also lautet der Optionscode "B1"
Keine Sonderoption.
Die Bestellnummer des benötigten Motors lautet daher: 8KSJ92.S1020B100-0