W poniższej tabeli wyszczególniono funkcje bezpieczeństwa zaimplementowane w modułach falownika ACOPOSmulti SafeMOTION, a także poziomy bezpieczeństwa, które można osiągnąć dzięki ich stosowaniu:
Funkcja bezpieczeństwa | EN ISO 13849-1 | EN 61508 / EN 62061 | Bezpieczeństwo | ||
|---|---|---|---|---|---|
EnDat 2.2 | SinCos | EnDat 2.2 | SinCos | ||
Safe Torque Off (STO) | PLe / CAT 4 | PLe / CAT 4 | SIL 3 | SIL 3 | Nie |
Safe Torque Off One Channel (STO1) | PLd / CAT 3 | PLd / CAT 3 | SIL 2 | SIL 2 | Nie |
Safe Operation Stop (SOS) | PLd / CAT 3 | Maks. PLe / CAT 4* | SIL 2 | Maks. SIL 3* | Tak |
Safe Stop 1 (SS1) | Monitorowanie na podstawie czasu: | Monitorowanie na podstawie czasu: | Monitorowanie na podstawie czasu: | Monitorowanie na podstawie czasu: | Monitorowanie na podstawie czasu: |
Safe Stop 2 (SS2) | PLd / CAT 3 | Maks. PLe / CAT 4* | SIL 2 | Maks. SIL 3* | Tak |
Safely Limited Speed (SLS) | PLd / CAT 3 | Maks. PLe / CAT 4* | SIL 2 | Maks. SIL 3* | Tak |
Safe Maximum Speed (SMS) | PLd / CAT 3 | Maks. PLe / CAT 4* | SIL 2 | Maks. SIL 3* | Tak |
Safe Direction (SDI) | PLd / CAT 3 | Maks. PLe / CAT 4* | SIL 2 | Maks. SIL 3* | Tak |
Safely Limited Increment (SLI) | PLd / CAT 3 | Maks. PLe / CAT 4* | SIL 2 | Maks. SIL 3* | Tak |
Safely Limited Acceleration (SLA) | PLd / CAT 3 | Maks. PLe / CAT 4* | SIL 2 | Maks. SIL 3* | Tak |
Safe Brake Control (SBC) | PLd / CAT 3 | PLd / CAT 3 | SIL 2 | SIL 2 | Nie |
Safely Limited Position (SLP) | PLd / CAT 3 | Maks. PLe / CAT 4* | SIL 2 | Maks. SIL 3* | Tak |
Safe Maximum Position (SMP) | PLd / CAT 3 | Maks. PLe / CAT 4* | SIL 2 | Maks. SIL 3* | Tak |
Safe Homing (bezpieczny powrót do położenia wyjściowego) | PLd / CAT 3 | Maks. PLe / CAT 4* | SIL 2 | Maks. SIL 3* | Tak |
Safe Brake Test (SBT) | - | Maks. PLd / CAT 3* | - | Maks. SIL 2* | Tak |
Remanent Safe Position (RSP) | PLd / CAT 3 | - | SIL 2 | - | Tak |
| * | Zależy od zastosowanego enkodera |
STO - Safe Torque Off (bezpieczne odłączenie momentu)
STO - Safe Torque Off (bezpieczne odłączenie momentu)
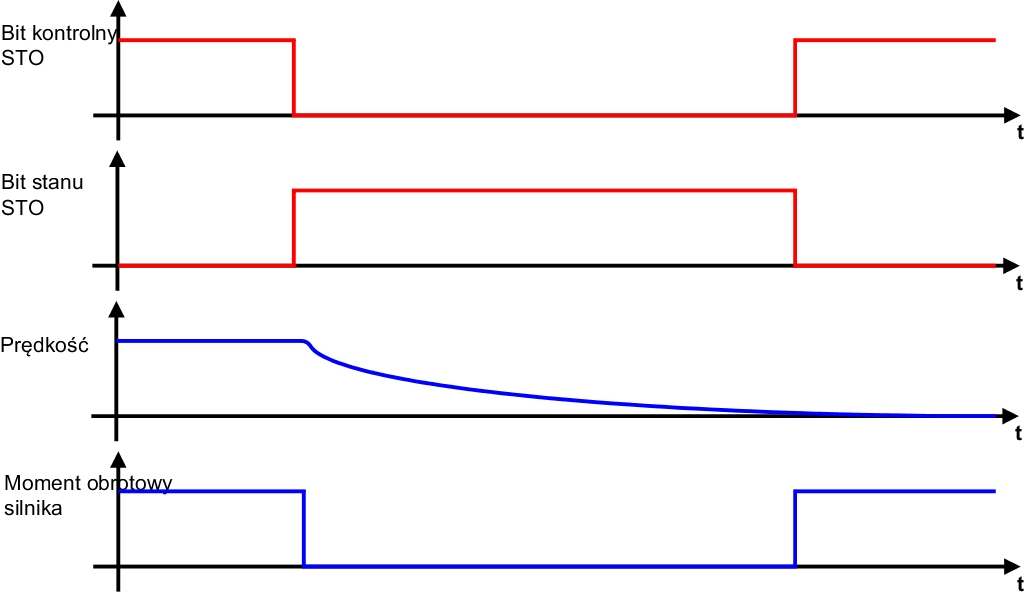
Safe Torque Off (bezpieczne odłączenie momentu) to stan, w którym silnik napędu nie jest już zasilany (czyli ani moment obrotowy, ani siła nie są już generowane). Zasilanie napędu jest bezpiecznie odłączone wskutek wzbudzenia bezpiecznego impulsu wyłączającego. Napęd nie jest już w stanie wygenerować momentu obrotowego, dlatego nie są możliwe jakiekolwiek potencjalnie niebezpieczne ruchy.
Stan STO jest dostępny dla SafeLOGIC jako zintegrowana funkcja bezpieczeństwa, może być zatem wywoływany bezpośrednio przez sieć, co eliminuje konieczność stosowania zewnętrznych przewodów.
Funkcja bezpieczeństwa STO stanowi podstawę dla wszystkich innych funkcji bezpieczeństwa. Jako realizacja zasady zamkniętego obwodu, jest stosowana przy każdym wystąpieniu błędu.
STO1 - Safe Torque Off 1 (bezpieczne odłączenie momentu)
STO1 - Safe Torque Off 1 (bezpieczne odłączenie momentu)
Funkcja bezpieczeństwa STO1 działa w taki sam sposób, jak STO. Jedyna różnica polega na tym, że tylko tranzystory IGBT HighSide lub LowSide są obcinane w zależności od konfiguracji.
SOS - Safe Operating Stop (bezpieczne zatrzymanie pracy)
SOS - Safe Operating Stop (bezpieczne zatrzymanie pracy)
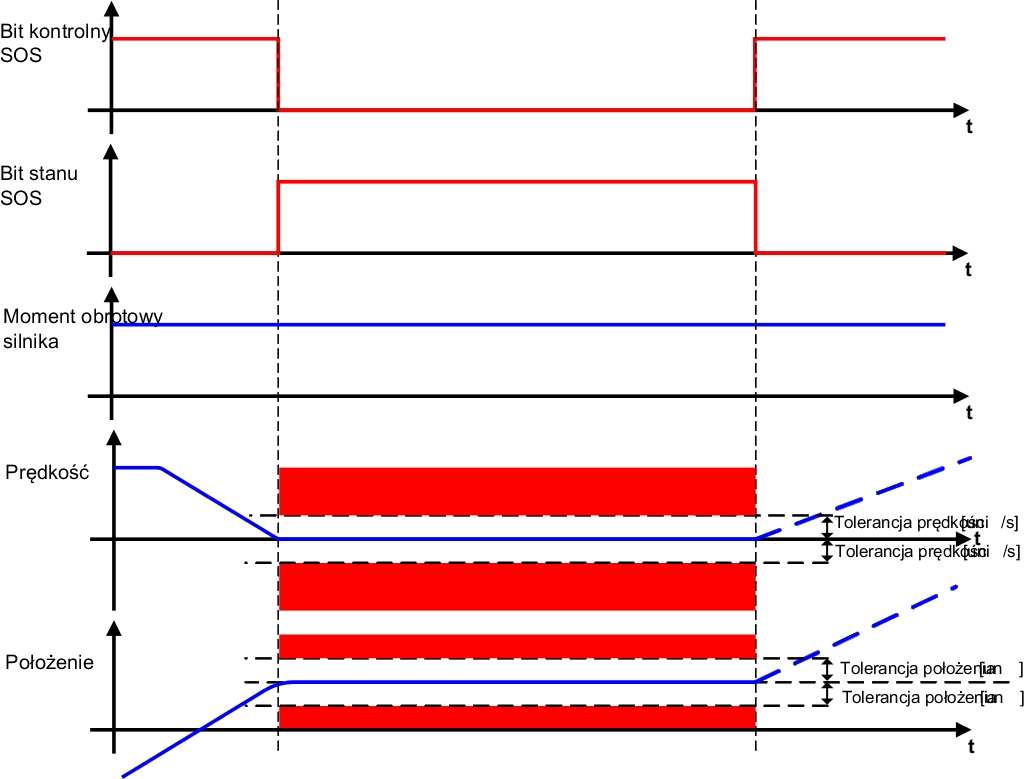
Safe Operating Stop (SOS) to stan, w którym napęd jest monitorowany pod kątem bezpiecznego zatrzymania. Napęd jest zasilany, dlatego można wygenerować moment obrotowy i siłę. Wszystkie funkcje sterowania między sterownikiem elektronicznym i silnikiem napędu są aktywne. Zatrzymanie osi jest monitorowane z zastosowaniem konfigurowalnego przedziału tolerancji zatrzymania. Monitorowane są zarówno położenie, jak i prędkość. Aby w bezpieczny sposób zebrać dane dot. prędkości i położenia, wymagany jest odpowiedni enkoder bezpieczeństwa. W przypadku przekroczenia wartości granicznych monitorowania zatrzymania, natychmiast uaktywniony zostaje bezpieczny impuls wyłączający, a napęd zostaje przełączony w stan błędu, co wymaga potwierdzenia.
Safe Stop 1 (SS1) (bezpieczne zatryzmanie) 1
Safe Stop 1 (SS1) (bezpieczne zatryzmanie) 1
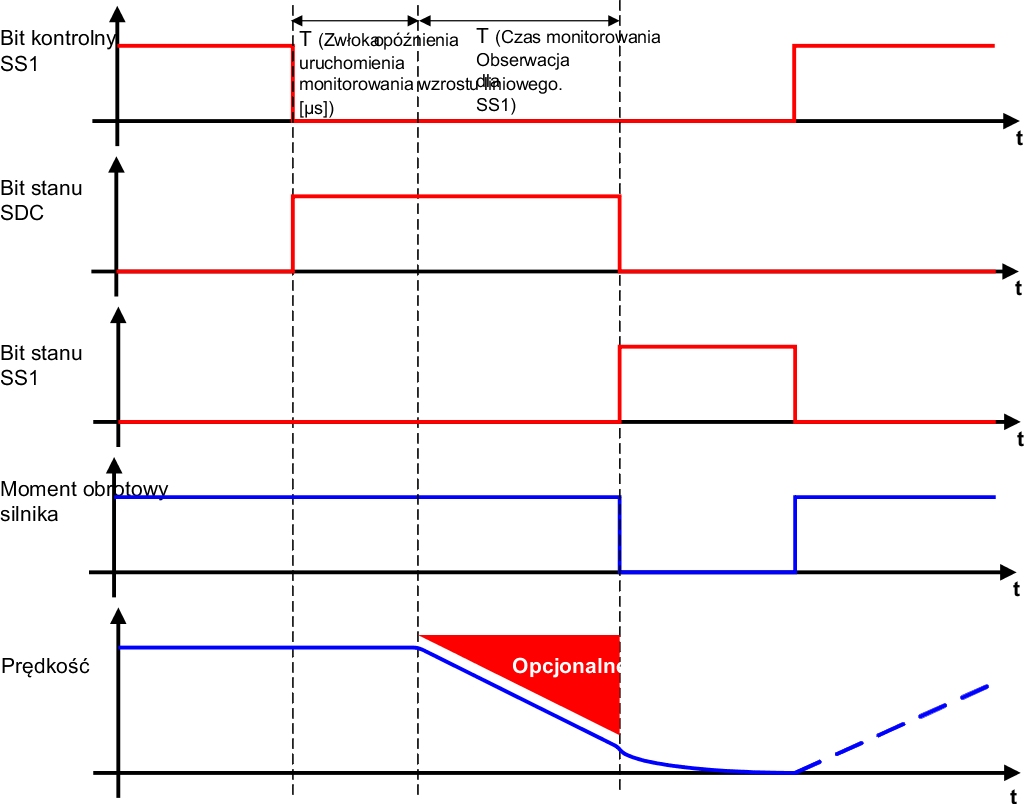
Funkcja bezpieczeństwa Safe Stop 1 (SS1) monitoruje silnik w momencie przejścia od ruchu do zatrzymania. Po całkowitym wyhamowaniu, uaktywnione zostaje bezpieczne wyłączenie impulsowe zatrzymujące całkowicie moment obrotowy i dopływ zasilania do napędu. W zależności od wymagań dotyczących funkcji bezpieczeństwa, możliwe jest monitorowanie tylko czasu hamowania lub liniowego przyrostu hamowania. W przypadku przekroczenia wartości granicznych monitorowania w trakcie hamowania, natychmiast uaktywnione zostaje bezpieczne wyłączenie impulsowe, a napęd zostaje przełączony w stan błędu, co wymaga potwierdzenia. Jedną z zalet monitorowania liniowego przyrostu hamowania jest zmniejszenie zakładanej pozostałej odległości do zatrzymania w razie wystąpienia błędu.
SS2 - Safe Stop (bezpieczne zatrzymanie) 2
SS2 - Safe Stop (bezpieczne zatrzymanie) 2
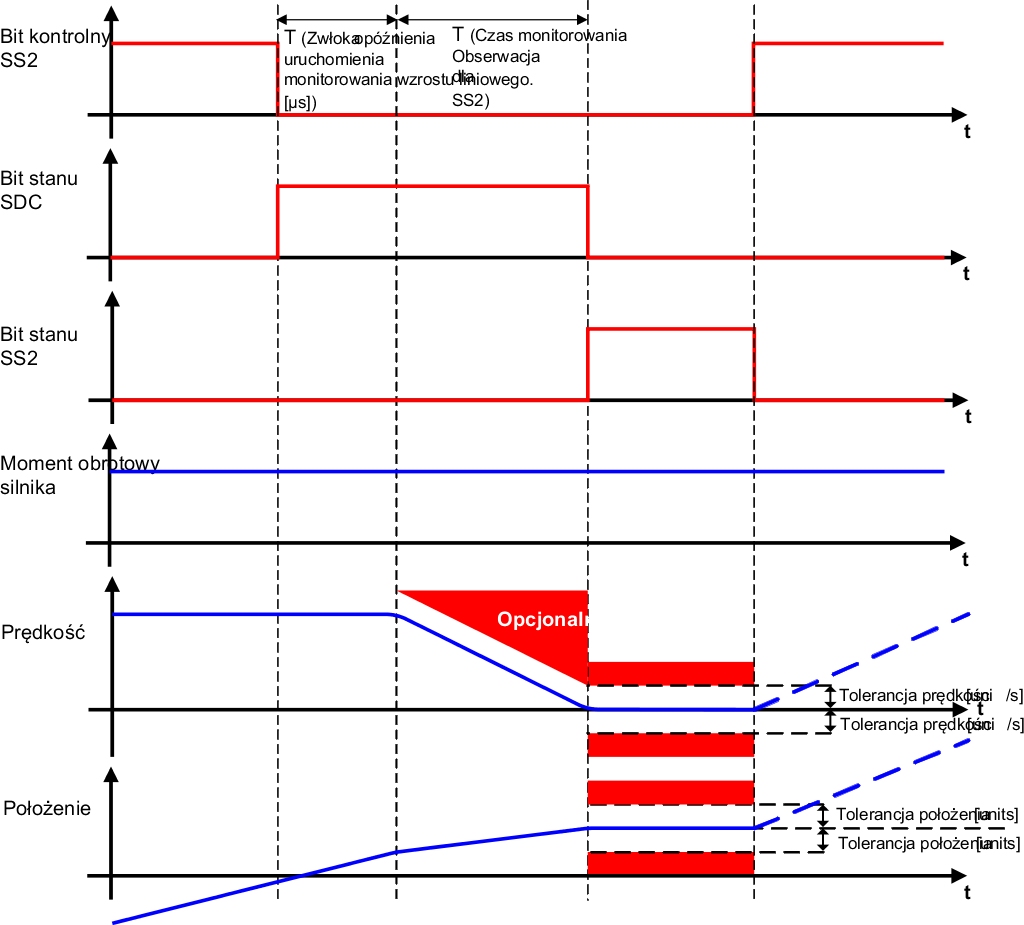
Podczas bezpiecznego zatrzymania 2 (SS2), przejście poruszającego się silnika do stanu zatrzymania jest monitorowane pod względem bezpieczeństwa. Napęd musi być następnie utrzymywany w stanie spoczynku za pomocą standardowej aplikacji. Podobnie, jak w przypadku SOS, to zatrzymanie jest monitorowane przez moduł SafeMOTION zgodnie ze skonfigurowanym przedziałem tolerancji zatrzymania.
Podobnie, jak w przypadku SS1, w zależności od wymagań dotyczących funkcji bezpieczeństwa, możliwe jest monitorowanie tylko czasu hamowania lub także liniowego przyrostu hamowania. W przypadku wykrycia przekroczenia w trakcie monitorowania przyrostu liniowego lub późniejszego monitorowania zatrzymania, natychmiast uaktywnione zostaje bezpieczne wyłączenie impulsowe i włączony zostaje stan błędu wymagający potwierdzenia.
SLS - Safely Limited Speed (bezpieczne ograniczenie prędkości )
SLS - Safely Limited Speed (bezpieczne ograniczenie prędkości )
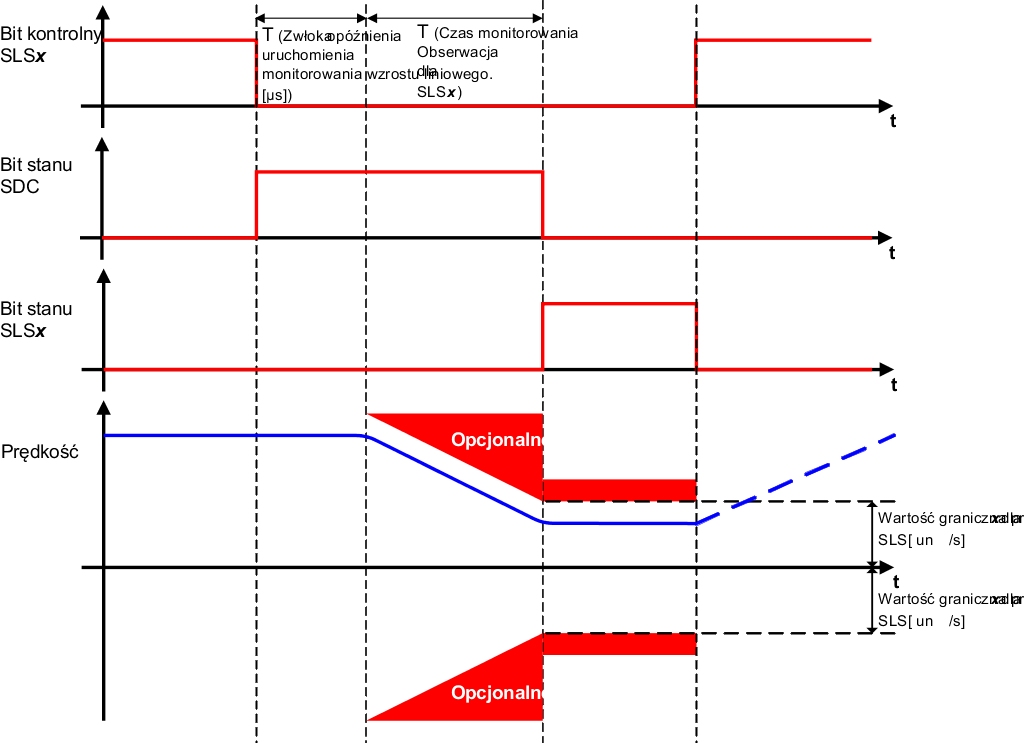
Funkcja bezpieczeństwa SLS monitoruje napęd, aby sprawdzić, czy nie zostały przekroczone konfigurowalne limity prędkości. Możliwe jest również monitorowanie hamowania, aż do osiągnięcia, w razie potrzeby, wartości granicznej przez aplikację. W zależności od wymagań, monitorowanie przyrostu liniowego hamowania można skonfigurować jako monitorowanie tylko okresu hamowania lub także monitorowanie liniowego przyrostu hamowania. W przypadku wykrycia przekroczenia w trakcie monitorowania przyrostu liniowego lub podczas monitorowania prędkości granicznej, natychmiast uaktywnione zostaje bezpieczne wyłączenie impulsowe i włączony zostaje stan błędu wymagający potwierdzenia.
SMS - Safe Maximum Speed (bezpieczna prędkość maksymalna)
SMS - Safe Maximum Speed (bezpieczna prędkość maksymalna)
Różnica pomiędzy SMS i SLS polega na tym, że SMS nie może być aktywnie wywołane. Jest włączane lub wyłączane poprzez konfigurację. Jeśli jest włączone, aktualna prędkość jest stale monitorowana w relacji do określonej wartości granicznej. W razie przekroczenia wartości granicznej natychmiast uaktywnione zostaje bezpieczne wyłączenie impulsowe i włączony zostaje stan błędu wymagający potwierdzenia.
SDI - Safe Direction (kierunek bezpieczny)
SDI - Safe Direction (kierunek bezpieczny)
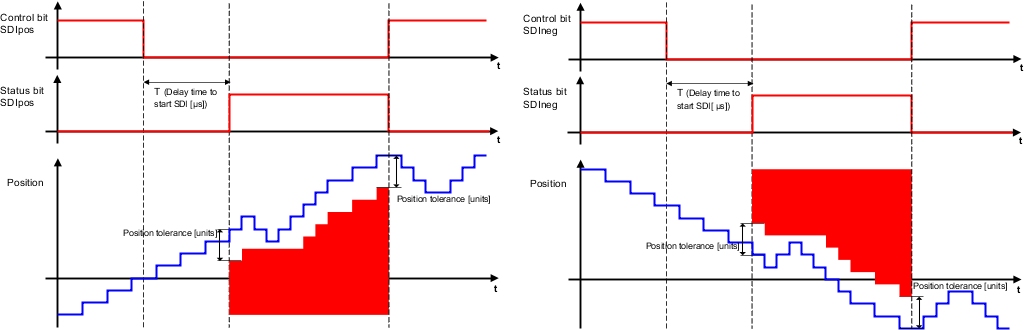
Funkcja bezpieczeństwa SDI monitoruje określony kierunek ruchu. W razie naruszenia przedziału natychmiast uaktywnione zostaje bezpieczne wyłączenie impulsowe i włączony zostaje stan błędu wymagający potwierdzenia. Można monitorować kierunek dodatni lub ujemny.
Funkcja bezpiecznego kierunku może być włączona równolegle z innymi funkcjami bezpieczeństwa.
Na przykład SLS może być ograniczone do określonego kierunku.
SLI - Safely Limited Increment (bezpiecznie ograniczony odstęp)kroku)
SLI - Safely Limited Increment (bezpiecznie ograniczony odstęp)kroku)
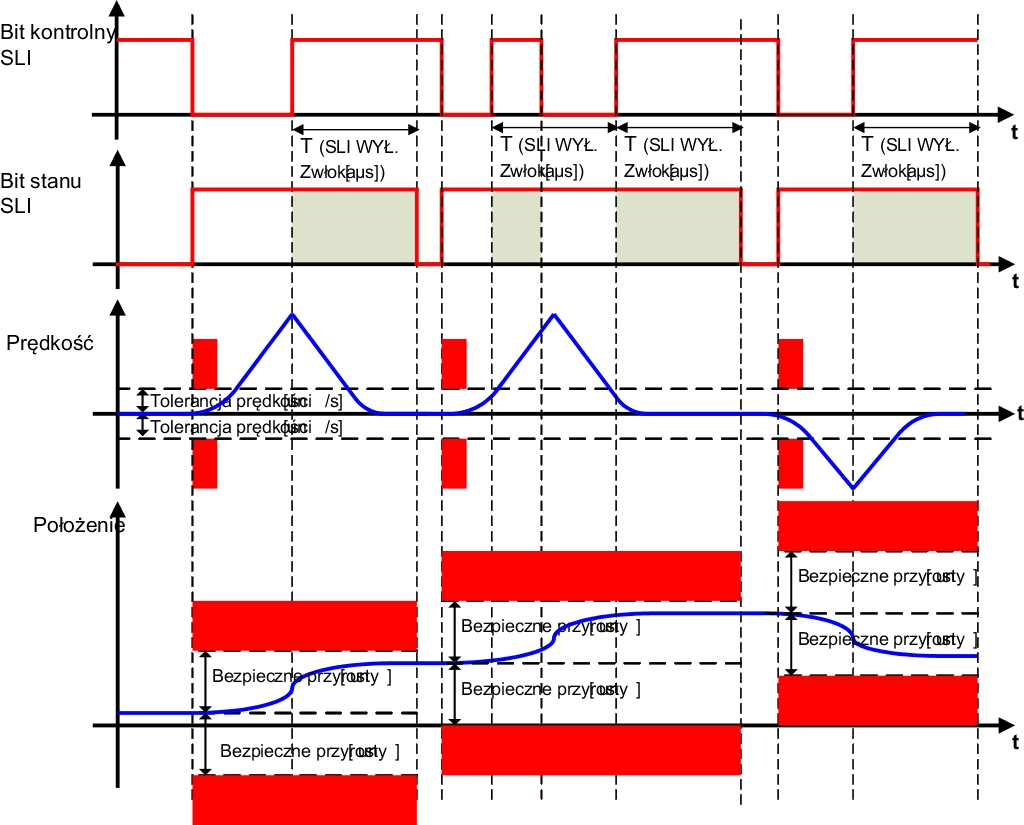
Przy pomocy funkcji bezpieczeństwa SLI monitorowany jest ruch w odniesieniu do określonej liczby przyrostów.
Oś bezpieczna musi być w stanie zatrzymania, gdy ta funkcja jest włączona. Generowany jest następnie przedział położenia, który jest monitorowany z punktu widzenia bezpieczeństwa. Przedział położenia zależy od skonfigurowanego bezpiecznego odstępu.
W razie naruszenia przedziału natychmiast uaktywnione zostaje bezpieczne wyłączenie impulsowe i włączony zostaje stan błędu wymagający potwierdzenia.
SLA - Safely Limited Acceleration (bezpiecznie ograniczone przyspieszenie)
SLA - Safely Limited Acceleration (bezpiecznie ograniczone przyspieszenie)
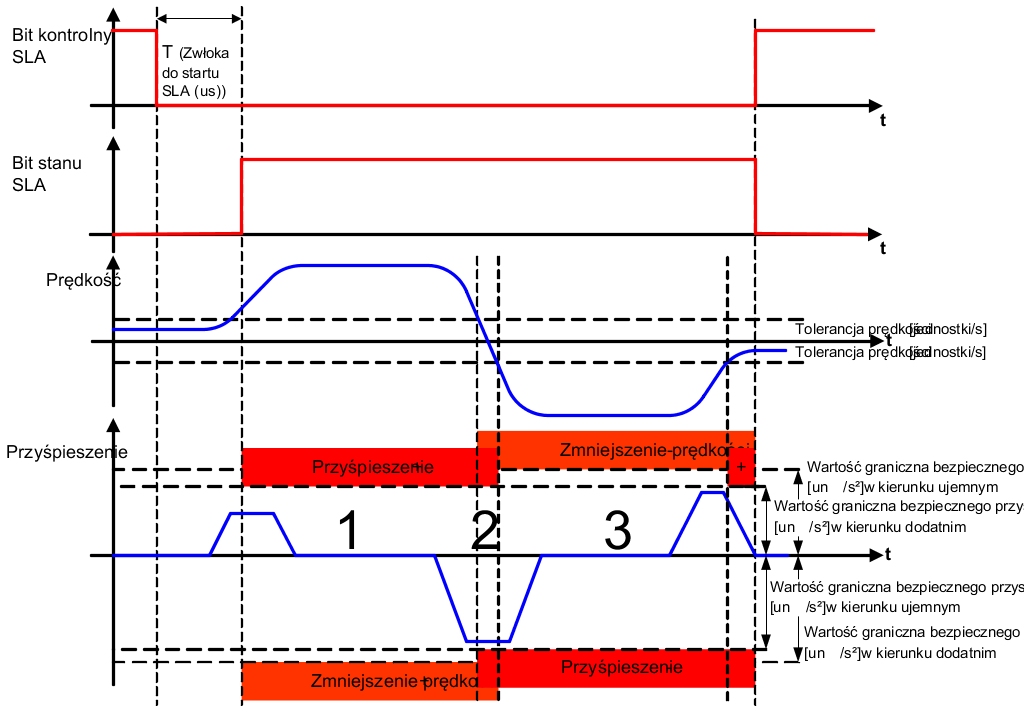
Funkcja bezpieczeństwa SLA jest używana do monitorowania przyspieszenia lub zmniejszenia prędkości w relacji do określonych maksymalnych wartości granicznych.
Wartości graniczne dla przyspieszenia i zmniejszenia prędkości są monitorowane w dodatnim kierunku ruchu.
Skonfigurowane wartości graniczne są monitorowane po upływie skonfigurowanego czasu. Ten czas opóźnienia kompensuje różnice w czasach przebiegu aplikacji standardowych i bezpieczeństwa.
SBC - Safe Brake Control (bezpieczne sterowanie hamowaniem)
SBC - Safe Brake Control (bezpieczne sterowanie hamowaniem)
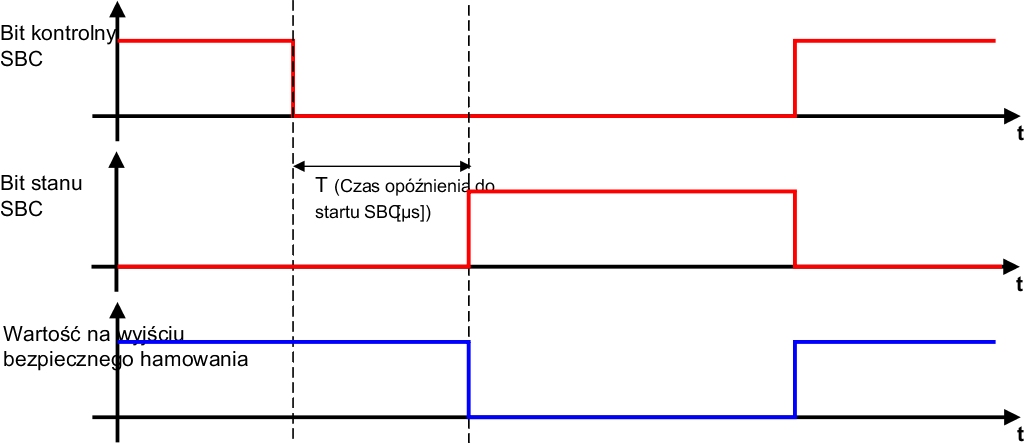
Safe Brake Control (SBC) wysyła bezpieczny sygnał wyjściowy, sterujący zewnętrznym hamulcem. Zintegrowana funkcja bezpieczeństwa SBC może być wywołana wprost, za pomocą SafeLOGIC, lub w razie wystąpienia błędu modułu. W zależności od jakości podłączonego hamulca i jego okablowania, funkcja może spełniać wymogi poziomu SBC SIL 2 zgodnie z normą EN 61508.
SLP - Safely Limited Position (bezpiecznie ograniczona pozycja)
SLP - Safely Limited Position (bezpiecznie ograniczona pozycja)
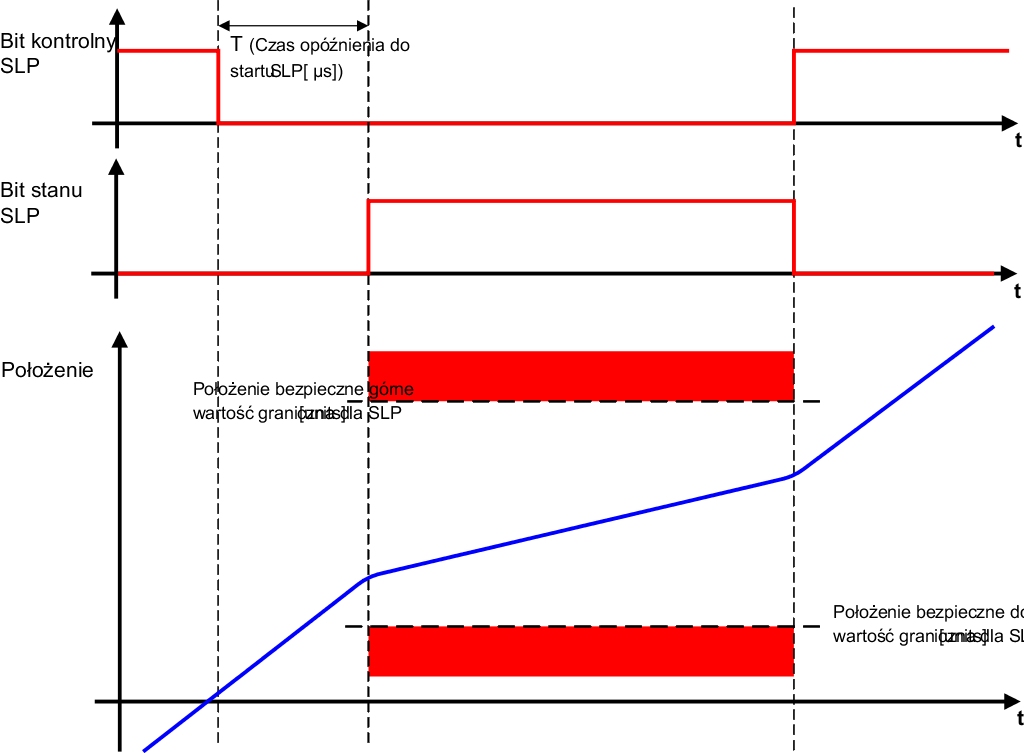
Celem funkcji bezpieczeństwa SLP jest monitorowanie określonego przedziału położenia.
Parametry mogą być wykorzystywane do konfiguracji dolnej i górnej wartości granicznej pozycjonowania przedziału monitorowania. Podczas zbliżania się do granicy pozycji, obliczane jest monitorowane ograniczenie prędkości w taki sposób, że napęd zatrzyma się całkowicie przed dotarciem do granicy pozycjonowania. Używany jest do tego skonfigurowany parametr przyrostu liniowego zwalniania.
SMP - Safe Maximum Position(bezpieczne położenie maksymalne)
SMP - Safe Maximum Position(bezpieczne położenie maksymalne)
Różnica pomiędzy SMS (bezpieczne położenie maksymalne) i SLP polega na tym, że SMP nie może być aktywnie wywołane. Jest włączane lub wyłączane poprzez konfigurację.
Jeśli jest włączone, aktualne położenie jest stale monitorowane w relacji do określonego przedziału położenia. Funkcja bezpieczeństwa SMP działa tylko z osiami w położeniu wyjściowym, gdyż wymaga bezpiecznego położenia absolutnego.
Podobnie jak w przypadku funkcji bezpieczeństwa SLP, funkcja SMP, oprócz położenia monitoruje również ograniczenie prędkości zależne od położenia w celu ograniczenia do minimum pozostałej odległości w przypadku wykroczenia poza przedział.
Safe Homing (bezpieczny powrót do położenia wyjściowego)
Safe Homing (bezpieczny powrót do położenia wyjściowego)
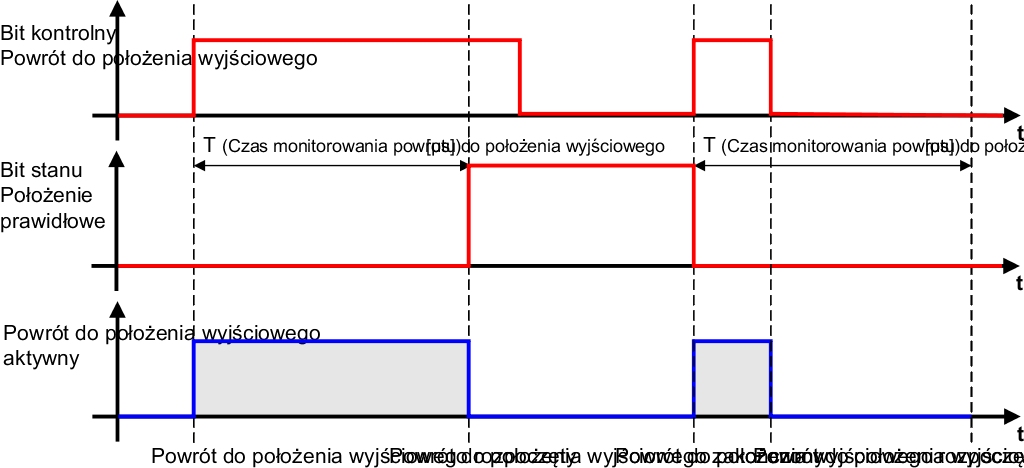
Funkcja Safe Homing zapewnia sposób ustalania odniesienia pomiędzy położeniem enkodera i położeniem urządzenia.
W zależności od trybu powrotu do położenia wyjściowego, może okazać się konieczne przeprowadzenie procedury naprowadzania napędu. Procedura naprowadzania wymaga, aby funkcje sterowania między sterownikiem elektronicznym i silnikiem napędu były aktywne. Może być konieczne wybranie innych funkcji bezpieczeństwa w celu uniknięcia niebezpiecznego stanu w trakcie procedury naprowadzania.
SBT - Safe Brake Test (test bezpiecznego hamowania)
SBT - Safe Brake Test (test bezpiecznego hamowania)
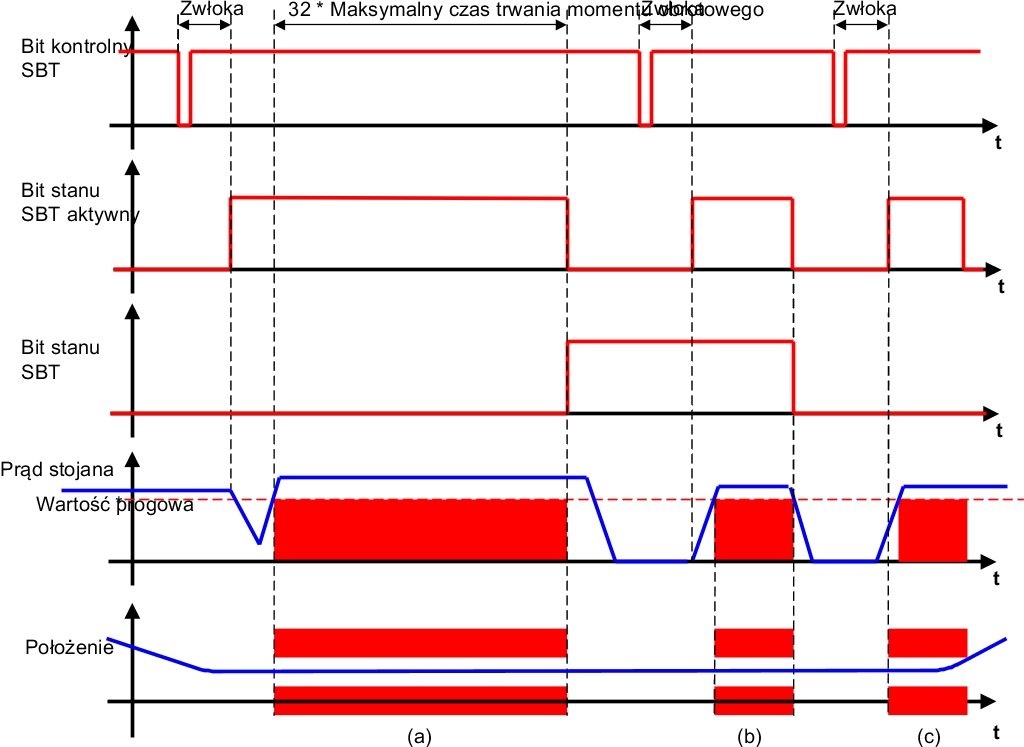
Funkcja bezpieczeństwa SBT (test bezpiecznego hamowania) umożliwia testowanie włączonego hamulca poprzez włączenie na pewien czas konfigurowalnego prądu stojana.
Funkcja bezpieczeństwa SBT nie jest funkcją konwencjonalną! Służy tylko do testowania włączonego hamulca wstrzymującego poprzez włączenie na pewien czas konfigurowalnego prądu stojana.
Test jest przeprowadzany przy określonym poziomie bezpieczeństwa oraz z określoną dokładnością.
RSP - Remanent Safe Position (blokada w położeniu bezpiecznym)
RSP - Remanent Safe Position (blokada w położeniu bezpiecznym)
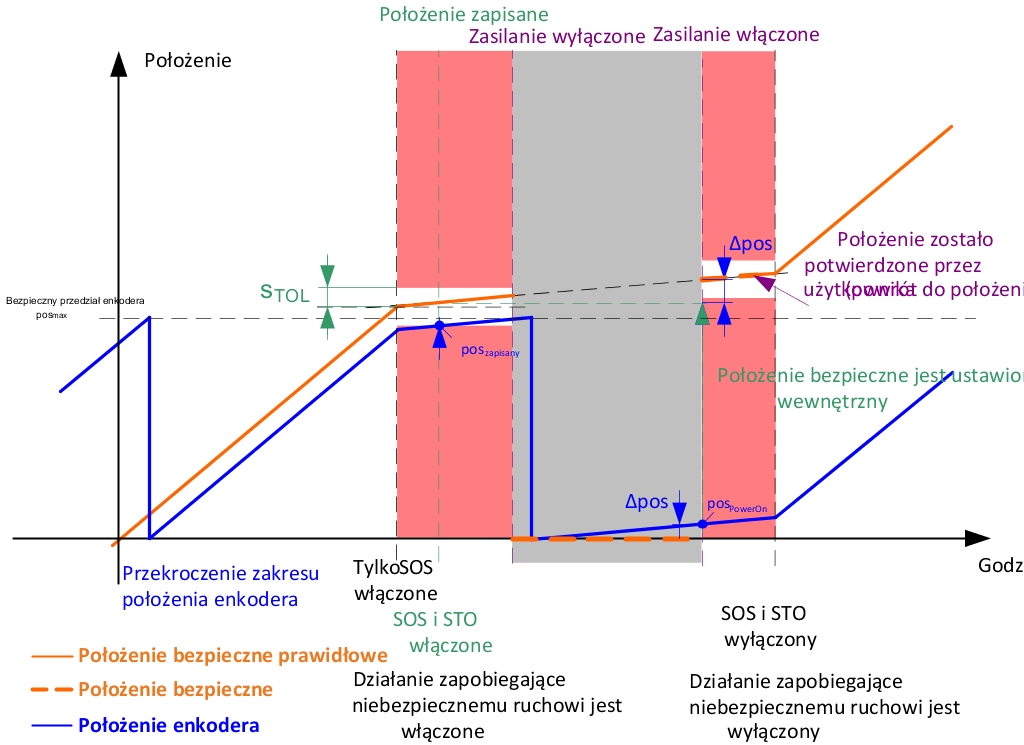
Dzięki funkcji bezpieczeństwa RSP, po powrocie urządzenia do bezpiecznego położenia wyjściowego nie ma potrzeby powtarzać tej procedury po każdym cyklu wyłączenia/włączenia zasilania.
Dane prawidłowego położenia można zapisać w pamięci tylko po kontrolowanym zatrzymaniu napędu. Konieczne jest zatem zapewnienie doprowadzenie do zatrzymania. Należy również uniemożliwić zasilanie napędu podczas zapisywania danych, aby nie dopuścić do uruchomienia napędu. Wymagania te są spełnione w przypadku korzystania z funkcji bezpieczeństwa STO i SOS.