A tabela a seguir lista as funções de segurança integradas nos módulos do inversor ACOPOSmulti SafeMOTION, bem como os níveis de segurança que podem ser alcançados quando utilizados:
Funções de segurança (Safety) | EN ISO 13849-1 | EN 61508 / EN 62061 | Seguro | ||
|---|---|---|---|---|---|
EnDat 2.2 | SinCos | EnDat 2.2 | SinCos | ||
Torque Seguro Desligado (STO) | PLe / CAT 4 | PLe / CAT 4 | SIL 3 | SIL 3 | Não |
Safe Torque Off One Channel (STO1) | PLd / CAT 3 | PLd / CAT 3 | SIL 2 | SIL 2 | Não |
Operação Segura de Parada (SOS) | PLd / CAT 3 | Max. PLe / CAT 4* | SIL 2 | Max. SIL 3* | Sim |
Parada Segura 1 (SS1) | Monitoramento baseado em tempo: | Monitoramento baseado em tempo: | Monitoramento baseado em tempo: | Monitoramento baseado em tempo: | Monitoramento baseado em tempo: |
Parada Segura 2 (SS2) | PLd / CAT 3 | Max. PLe / CAT 4* | SIL 2 | Max. SIL 3* | Sim |
Limitação de Velocidade Segura (SLS) | PLd / CAT 3 | Max. PLe / CAT 4* | SIL 2 | Max. SIL 3* | Sim |
Máxima Velocidade Segura (SMS) | PLd / CAT 3 | Max. PLe / CAT 4* | SIL 2 | Max. SIL 3* | Sim |
Direção Segura (SDI) | PLd / CAT 3 | Max. PLe / CAT 4* | SIL 2 | Max. SIL 3* | Sim |
Intervalo Limitado Seguro (SLI) | PLd / CAT 3 | Max. PLe / CAT 4* | SIL 2 | Max. SIL 3* | Sim |
Aceleração Limitada com Segurança (SLA) | PLd / CAT 3 | Max. PLe / CAT 4* | SIL 2 | Max. SIL 3* | Sim |
Controle de Freio Seguro (SBC) | PLd / CAT 3 | PLd / CAT 3 | SIL 2 | SIL 2 | Não |
Posição Segura Limitada (SLP) | PLd / CAT 3 | Max. PLe / CAT 4* | SIL 2 | Max. SIL 3* | Sim |
Posição máxima segura (SMP) | PLd / CAT 3 | Max. PLe / CAT 4* | SIL 2 | Max. SIL 3* | Sim |
Homing seguro | PLd / CAT 3 | Max. PLe / CAT 4* | SIL 2 | Max. SIL 3* | Sim |
Teste de Freio Seguro (SBT) | - | Max. PLd / CAT 3* | - | Max. SIL 2* | Sim |
Posição segura remanente (RSP) | PLd / CAT 3 | - | SIL 2 | - | Sim |
| - | Depende do codificador utilizado |
STO - Torque Seguro Desligado
STO - Torque Seguro Desligado
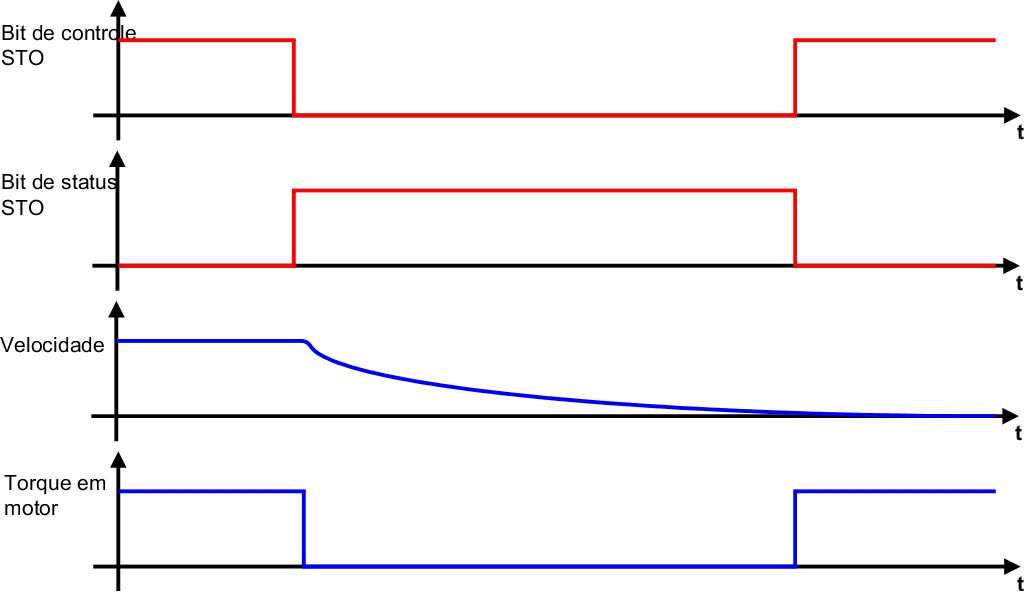
Safe Torque Off é o estado em que o motor de acionamento não é mais fornecido com energia (isto é, sem torque e força sendo gerada). A fonte de alimentação para a unidade é cortada com segurança ativando a desativação segura do pulso de forma segura. Como a unidade não é mais capaz de gerar torque, é impossível que ocorram movimentos potencialmente perigosos.
A STO é disponibilizada para SafeLOGIC como uma função de segurança integrada e pode, portanto, ser solicitada diretamente pela rede, eliminando a necessidade de fiação externa.
A função de segurança STO fornece a base para todas as outras funções de segurança. Como a implementação do princípio de circuito fechado, é aplicado sempre que ocorre um erro.
STO1 - Torque Seguro Desligado 1
STO1 - Torque Seguro Desligado 1
A função de segurança STO1 funciona da mesma forma que a STO. A única diferença é que apenas o HighSide ou apenas os IGBTs LowSide são cortados dependendo da configuração.
SOS - Safe Operating Stop
SOS - Safe Operating Stop
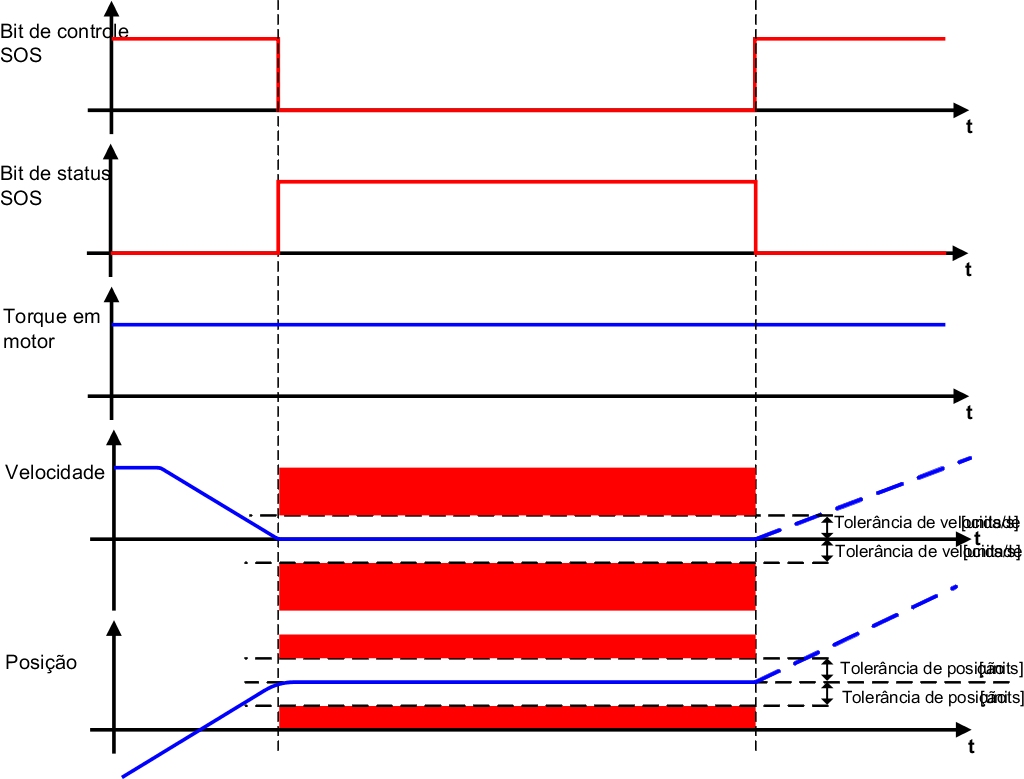
Safe Operating Stop (SOS) é o estado em que o inversor é monitorado para chegar a um ponto seguro. O drive é alimentado com energia e isso pode portanto gerar torque e força. Todos controles de função entre o controle eletrônico e o drive do motor estão ativos. A parada do eixo é monitorada usando uma janela de tolerância imobilizada configurável. Tanto a posição como a velocidade são monitorados. Para recolher os dados de velocidade e posição de uma forma segura, é necessário um codificador de segurança adequado. Se os limites de monitoração de parada forem violados, a desativação segura do pulso é ativada imediatamente e o inversor comuta para um estado de erro que deve ser confirmado.
Safe stop 1 (SS1)
Safe stop 1 (SS1)
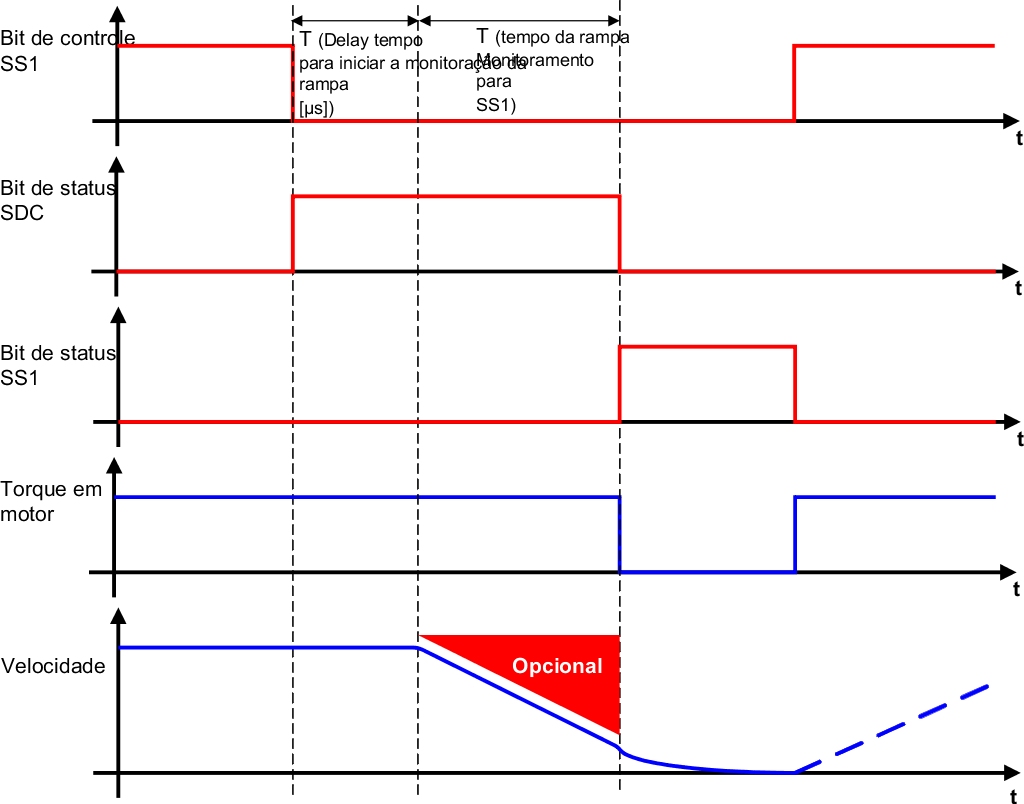
A função de segurança Safe Stop 1 (SS1) monitora um motor enquanto ele transita de movimento para paralisação. Quando completamente desacelerado, a desactivação segura do pulso é activada para cortar todo o binário e potência do conversor. Dependendo dos requisitos para a função de segurança, é possível monitorar apenas o tempo de desaceleração ou a rampa de desaceleração. Se os limites de monitorização forem violados durante a desaceleração, a desactivação segura do pulso é activada imediatamente e é activado um estado de erro que requer confirmação. Uma vantagem de monitorar a rampa de desaceleração é que ela reduz a distância restante presumida para ficar parada quando ocorre um erro.
SS2 - A Parada Segura 2
SS2 - A Parada Segura 2
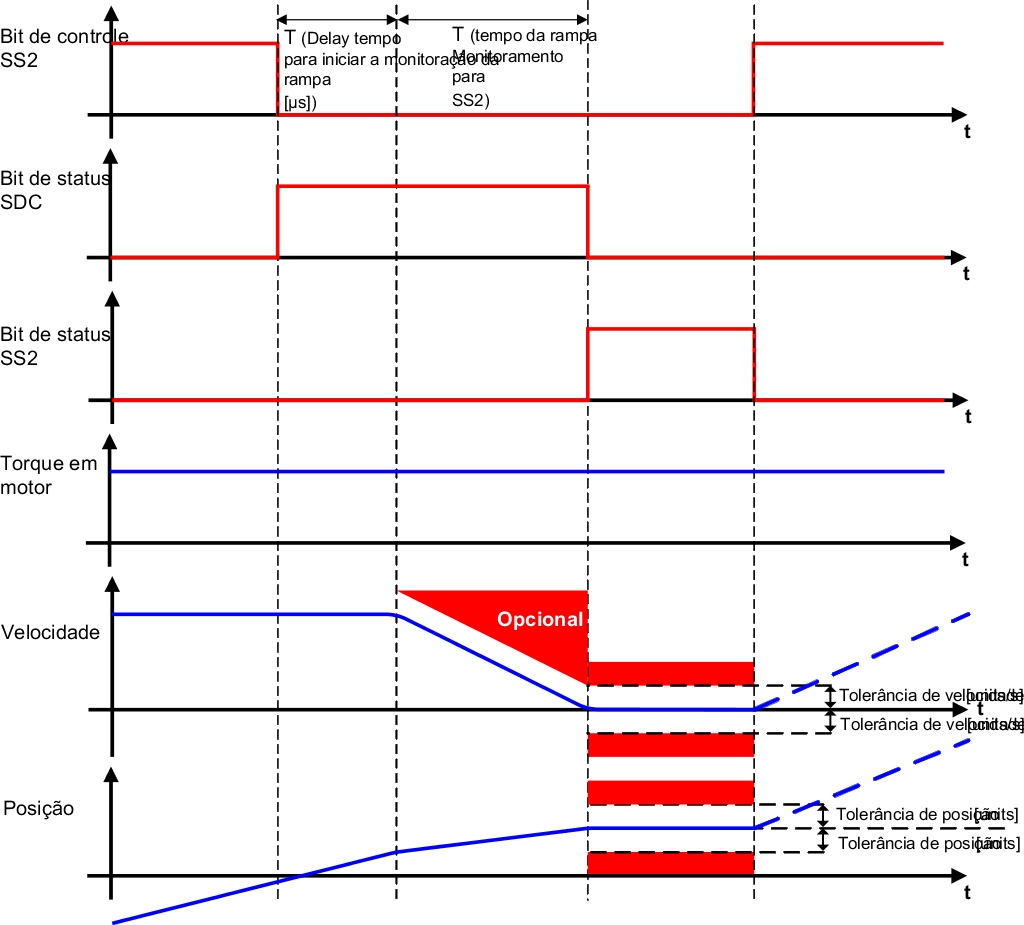
Durante a Parada Segura 2 (Safe Stop 2 - SS2), a transição de estado de movimentação do motor para parada é monitorada. A unidade deve então ser mantida em repouso pela aplicação padrão. Tal como no SOS, esta parada é monitorizada pelo módulo SafeMOTION de acordo com a janela de tolerância de parada configurada.
Tal como acontece com o SS1, é possível monitorar apenas o tempo de desaceleração ou também a rampa de desaceleração, dependendo dos requisitos da função de segurança. Se for detectada uma violação durante a monitorização da rampa ou a subsequente monitorização de paragem, a desativação segura do pulso é imediatamente ativada e é ativado um estado de erro que requer confirmação.
SLS - Velocidade Limitada com Segurança
SLS - Velocidade Limitada com Segurança
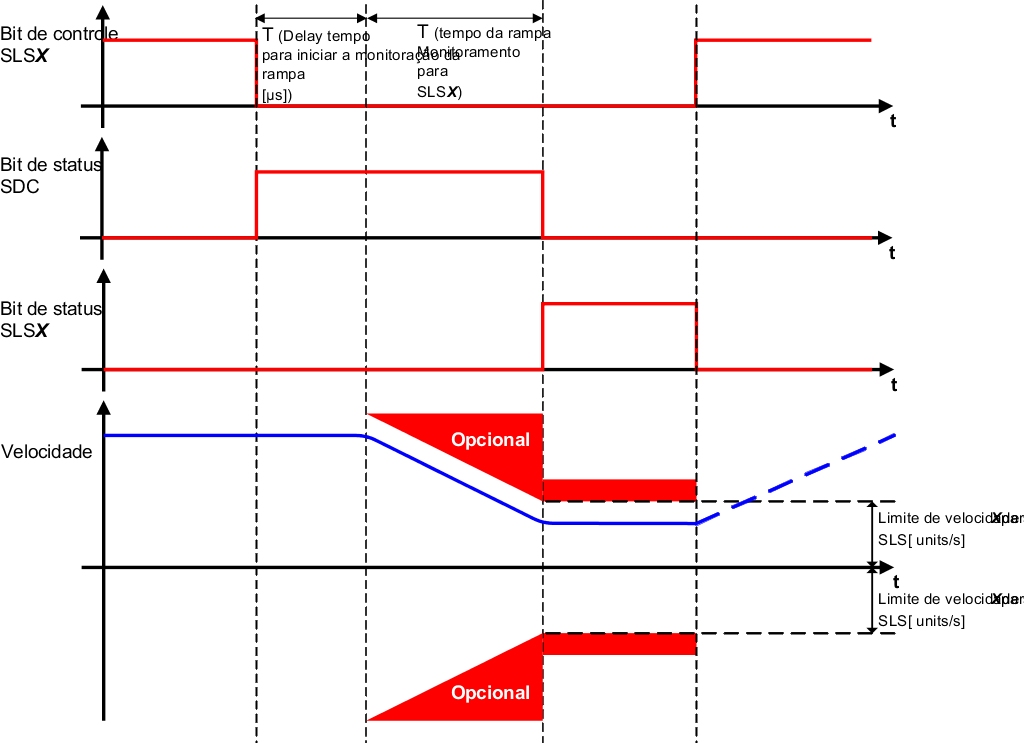
A função de segurança SLS monitora o acionamento para garantir que os limites configuráveis de velocidade não sejam excedidos. Também é possível monitorar a desaceleração até que o limite seja atingido se necessário pela aplicação. Dependendo dos requisitos, a monitoração da rampa de desaceleração pode ser configurada para monitorar apenas o período de desaceleração ou para monitorar também a rampa de desaceleração. Se uma violação for detectada durante a desaceleração ou quando estiver monitorando a velocidade limite, a desativação segura do pulso é ativada imediatamente e um estado de erro que requer confirmação é disparado.
SMS - Safe Maximum Speed
SMS - Safe Maximum Speed
A diferença entre SMS e SLS é que o SMS não pode ser ativamente solicitado. Ele é habilitado ou desabilitado pela configuração. Quando ativado, a velocidade atual é constantemente monitorada contra um limite definido. Se o limite for excedido, a desabilitação segura do pulso é ativada imediatamente e um estado de erro reconhecível é disparado.
SDI - Safe Direction
SDI - Safe Direction
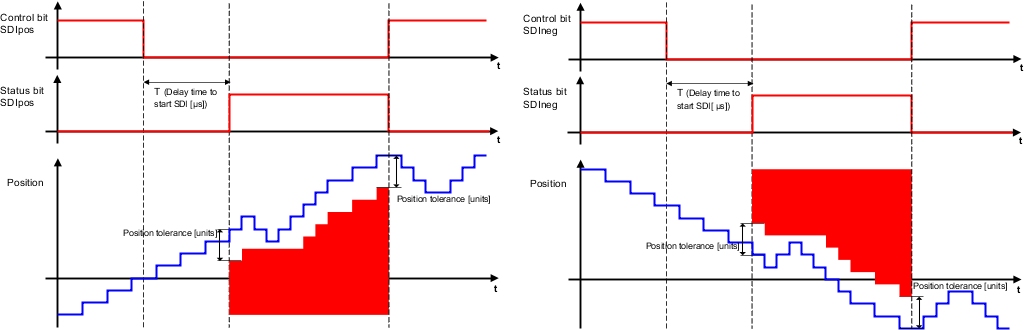
A função de segurança de Direção Segura (Safe Direction - SDI) monita a direção do movimento. Se o intervalo for violado, a desabilitação segura do pulso é ativada imediatamente e um estado de erro reconhecível é disparado. Tanto a direção positiva como a negativa podem ser monitoradas.
A função de direcção segura pode ser activada em paralelo com outras funções de segurança.
Por exemplo, SLS pode limitar uma certa direção.
SLI - Incremento Limitado com Segurança
SLI - Incremento Limitado com Segurança
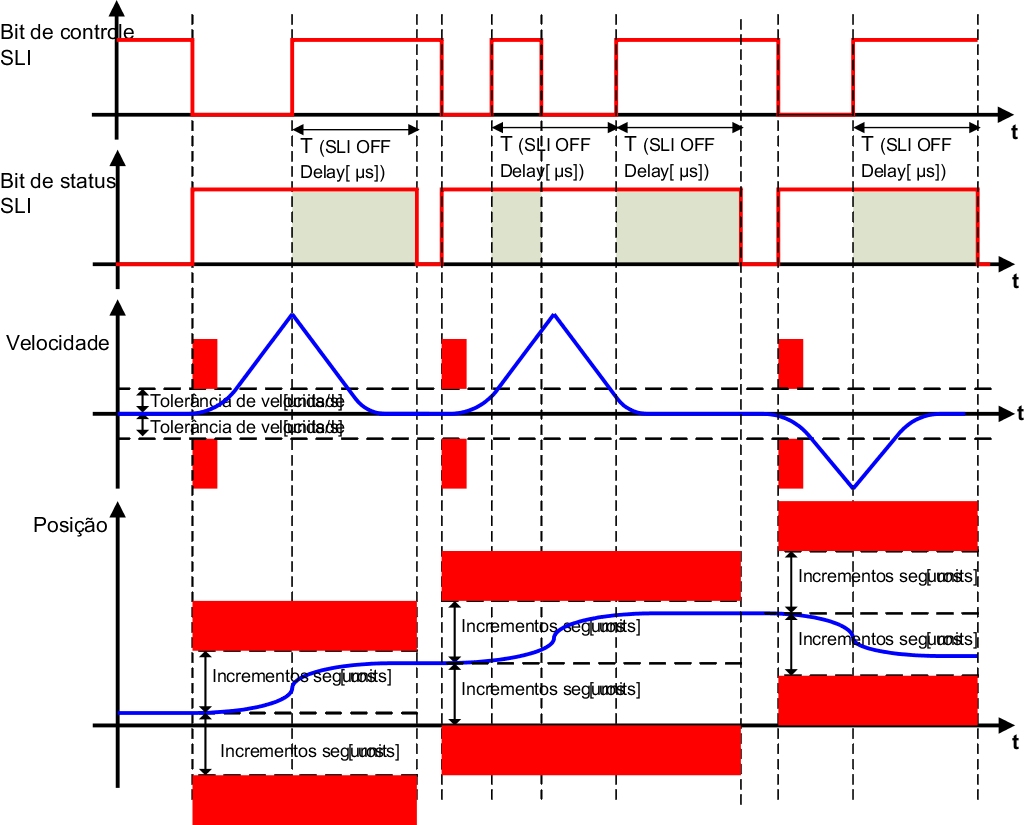
Com a função de segurança SLI, um movimento é monitorado em relação a um número definido de incrementos.
O eixo de segurança deve estar parado quando esta função está activada. Uma janela de posição é então gerada que é monitorada de um ponto de vista de segurança. A janela de posição depende do intervalo de segurança configurado.
Se o intervalo for violado, a desabilitação segura do pulso é ativada imediatamente e um estado de erro reconhecível é disparado.
SLA - Aceleração com segurança limitada
SLA - Aceleração com segurança limitada
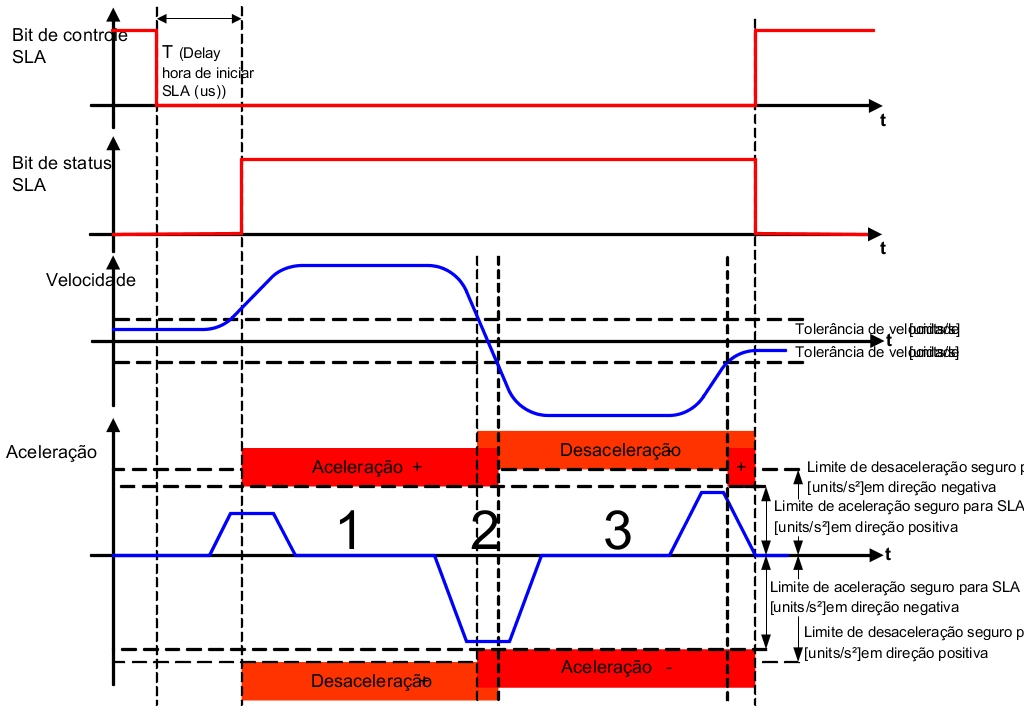
A função de segurança SLA é usada para monitorar a aceleração ou desaceleração em relação aos limites máximos definidos.
Os limites de aceleração e desaceleração são monitorados no sentido positivo de movimento.
Os limites configurados são monitorados após o tempo configurado ter expirado. Este tempo de atraso compensa os diferentes tempos de execução das aplicações padrão e de segurança.
SBC - Controle de Freio Seguro
SBC - Controle de Freio Seguro
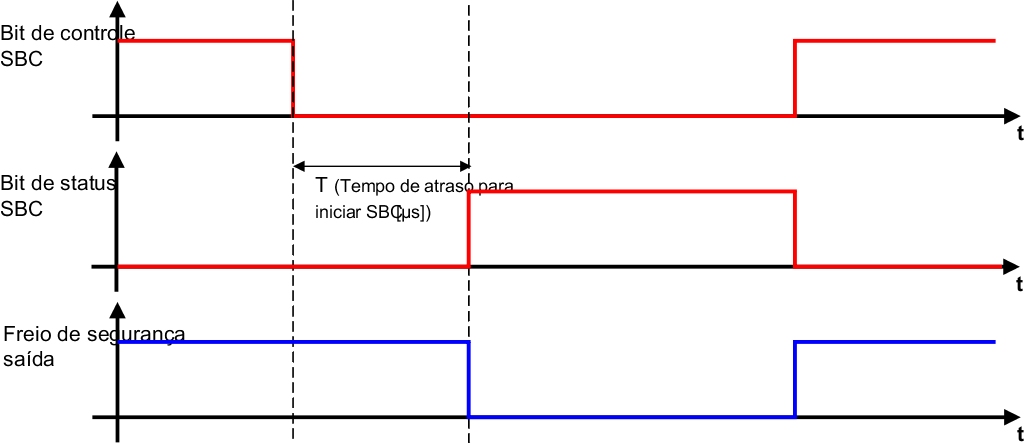
O Controle de Freio Seguro (Safe Brake Control - SBC) manda um sinal de saída seguro para o controle dos freios externos. A função de segurança integrada SBC pode ser requisitada via SafeLOGIC ou quando um erro de módulo acontece. Dependendo da qualidade dos freios e do cabeamento, a função pode cumprir a SBC SIL 2 de acordo com EN 61508.
SLP - Posição Limitada Segura
SLP - Posição Limitada Segura
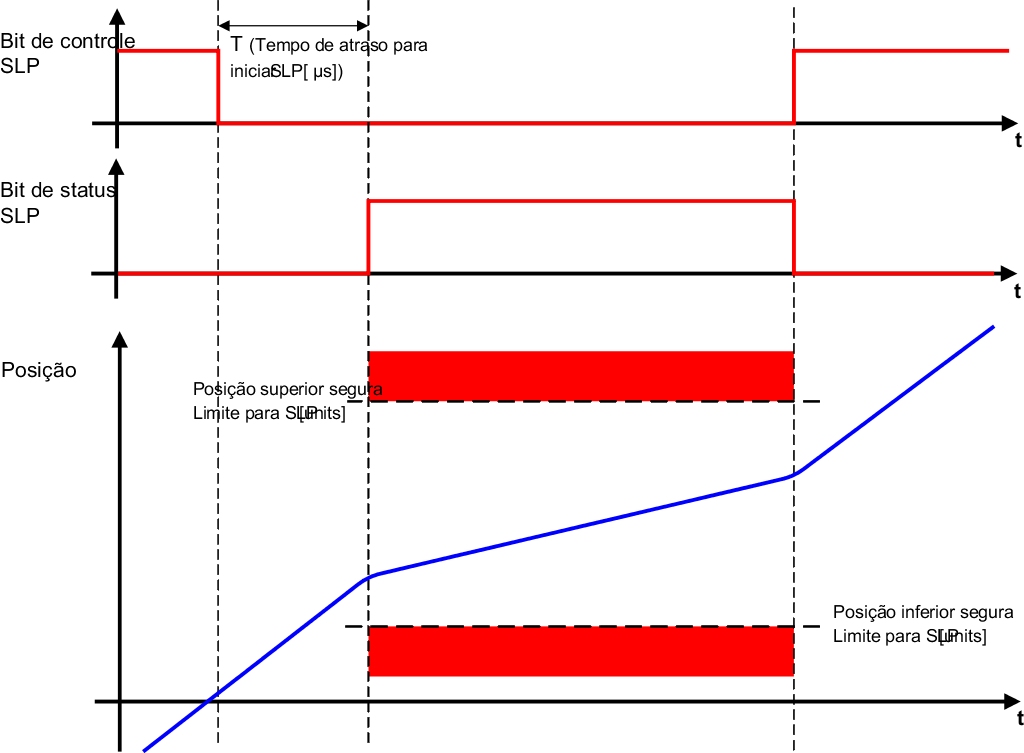
O objetivo da função de segurança SLP é monitorar uma janela de posição especificada.
Os parâmetros podem ser usados para configurar os limites de posicionamento inferior e superior da faixa de monitoramento. Quando se aproxima o limite de posição, o limite de velocidade controlado é calculado de tal forma que o accionamento chega ao ponto final antes de o limite de posicionamento ser atingido utilizando o parâmetro de rampa de desaceleração configurado.
SMP - Safe Maximum Position
SMP - Safe Maximum Position
A diferença entre SMP (Safe Maximum Position) e SLP é que o SMP não pode ser ativamente solicitado. Ele é habilitado ou desabilitado pela configuração.
Quando ativado, a posição atual é constantemente monitorada contra uma janela de posição definida. A função de segurança SMP só funciona com os eixos alojados, uma vez que requer uma posição absoluta segura.
Tal como acontece com a função de segurança SLP, a função SMP também monitora um limite de velocidade dependente da posição além da posição para minimizar a distância restante se a janela de posição for excedida.
Homing seguro
Homing seguro
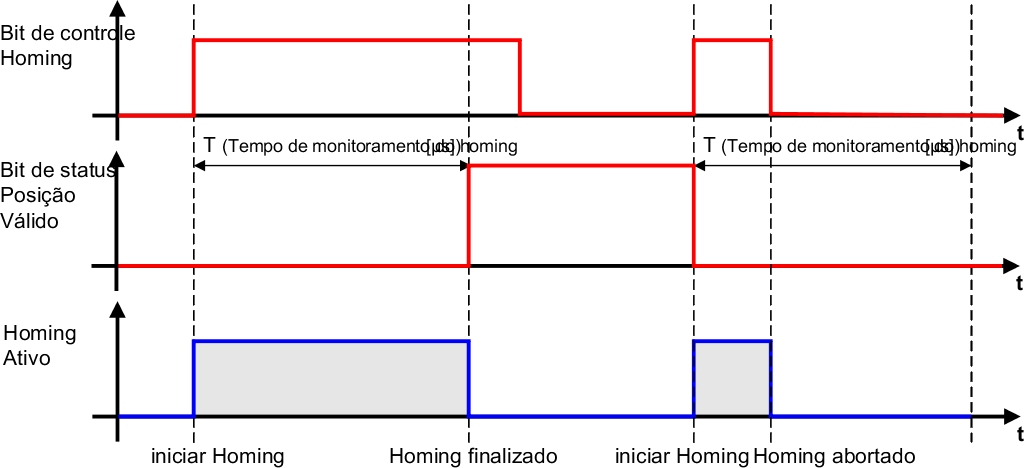
A função Safe Homing fornece uma forma de estabelecer uma referência entre a posição do encoder e a posição da máquina.
Dependendo do modo de referência, pode ser necessário que o inversor execute um procedimento de referência. Um procedimento de homing requer que as funções de controle entre o controlador eletrônico e o motor de acionamento estejam ativas. Outras funções de segurança podem ter de ser seleccionadas para evitar um estado perigoso durante o procedimento de localização.
SBT - Teste de Freio Seguro
SBT - Teste de Freio Seguro
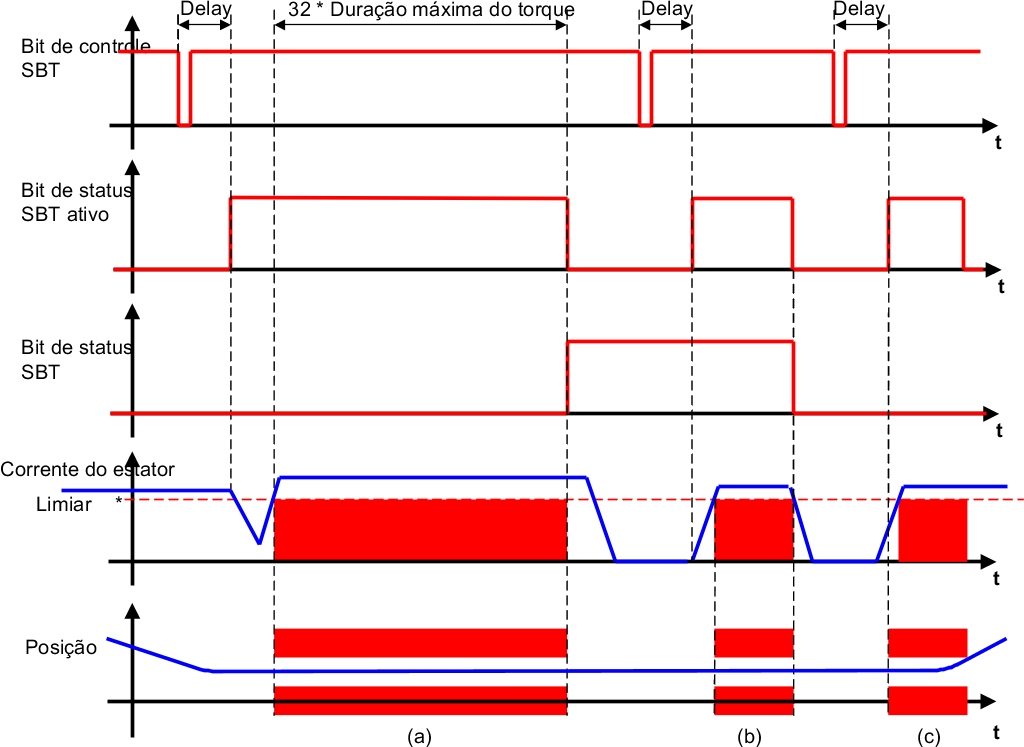
A função de segurança SBT (Safe Brake Test) permite que um freio engatado seja testado aplicando uma corrente configurável do estator por um determinado período de tempo.
A função de segurança SBT não é uma função de segurança convencional! Ele é usado somente para testar um freio de retenção engatado aplicando uma corrente de estator configurável por um determinado período de tempo.
O ensaio é efectuado com o nível de segurança especificado e com a precisão especificada.
RSP - Posição Segura Remanent
RSP - Posição Segura Remanent
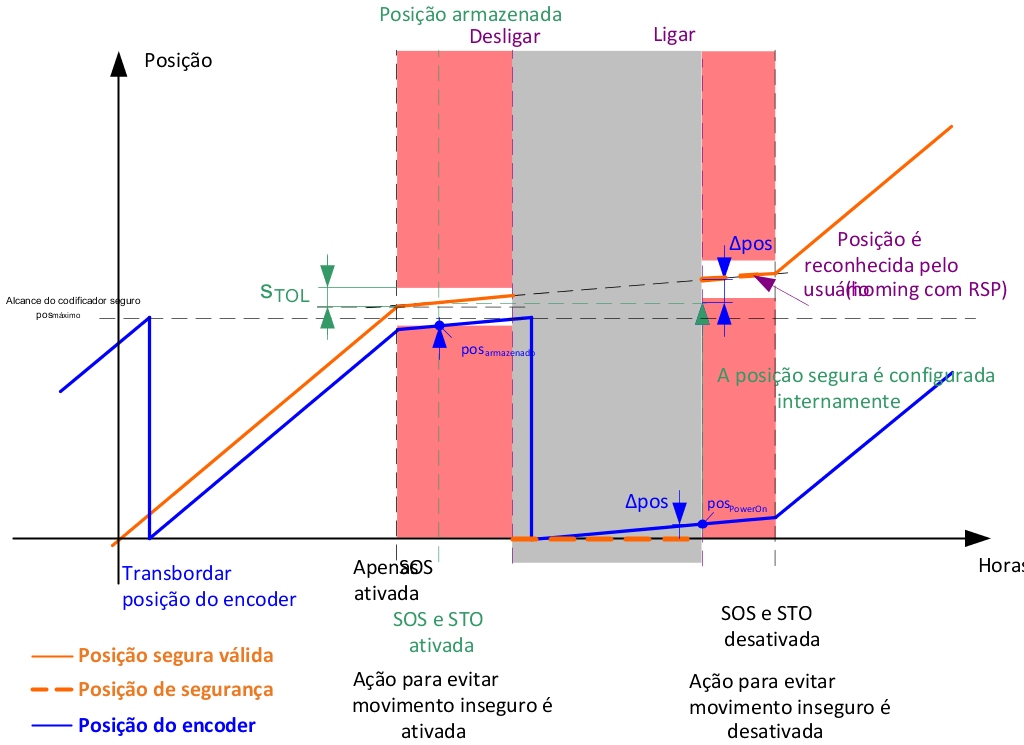
Com a função de segurança RSP, depois de a posição de segurança ter sido deslocada uma vez na posição da máquina, a posição de segurança não deve voltar a ser colocada novamente após um ciclo de desligar/ligar.
Só é possível armazenar dados de posição válidos após uma paragem controlada do accionamento. Por conseguinte, a paralisação deve ser assegurado. Também deve ser assegurado que nenhuma energia é fornecida ao conversor enquanto os dados estão sendo salvos, de modo que não é possível mover o inversor. Estes requisitos são satisfeitos ao utilizar as funções de segurança STO e SOS.