Einfache und schnelle Produktion mit ACOPOStrak
Die Systemsoftware mapp Trak erleichtert das Engineering für das Track-System ACOPOStrak und optimiert die Time-to-market für Produkte. Sie ermöglicht, dass Shuttles nicht kollidieren, keine virtuellen Barrieren überfahren und die konfigurierten Geschwindigkeitsbeschränkungen einhalten.
Steigern Sie Ihre Produktivität

Sparen Sie Zeit und Kosten
mapp Trak macht intelligente Track-Systeme einfach handhabbar. Mit der Systemsoftware können Sie Ihre Produkte in kurzer Zeit auf den Markt bringen und einen attraktiver Return-on-Investment erreichen.

Programmieren Sie Tracks so einfach wie noch nie
In mapp Trak wird das Track-System prozessorientiert programmiert. Sie legen mittels Regeln fest, wie sich die Shuttles am Track verhalten sollen.

Nutzen Sie die Simulation
Mit der in mapp Trak integrierten Simulation können Sie testen, mit wie vielen Shuttles und bei welcher Geschwindigkeit die Applikation die höchste Produktivität aufweist.

Profitieren Sie von FDA-konformen Tracking
mapp Trak verknüpft die Produktdaten mit den jeweiligen Shuttles und macht die Produktherstellung so lückenlos nachverfolgbar.
Reibungsfreier Ablauf
Durch die hochskalierbare Systemarchitektur von ACOPOStrak lassen sich Layouts mit Tracklängen von mehr als 100 Metern und mehreren hundert Shuttles aufbauen. Und dennoch gilt: Mit der Systemsoftware mapp Trak ist die Komplexität des Track-Systems leicht handhabbar.
Kollisionen ausgeschlossen
mapp Trak liefert entscheidende Funktionen für ACOPOStrak einfach mit – zum Beispiel: die Kollisionsvermeidung, das Trennen und Zusammenführen von Produktströmen bei voller Geschwindigkeit oder die Berechnung optimaler Routen. Ein Applikations-Entwickler muss sich demnach nicht um diese Aufgaben kümmern – das spart Engineering-Zeit. Selbst bei verschieden großen Produkten und Traglasten gibt es keine Kollisionen: Die Produktgröße wird konfiguriert oder mit Sensoren gemessen. mapp Trak passt die Steuerung der Shuttles automatisch an, damit es zu keinen Zusammenstößen kommt.
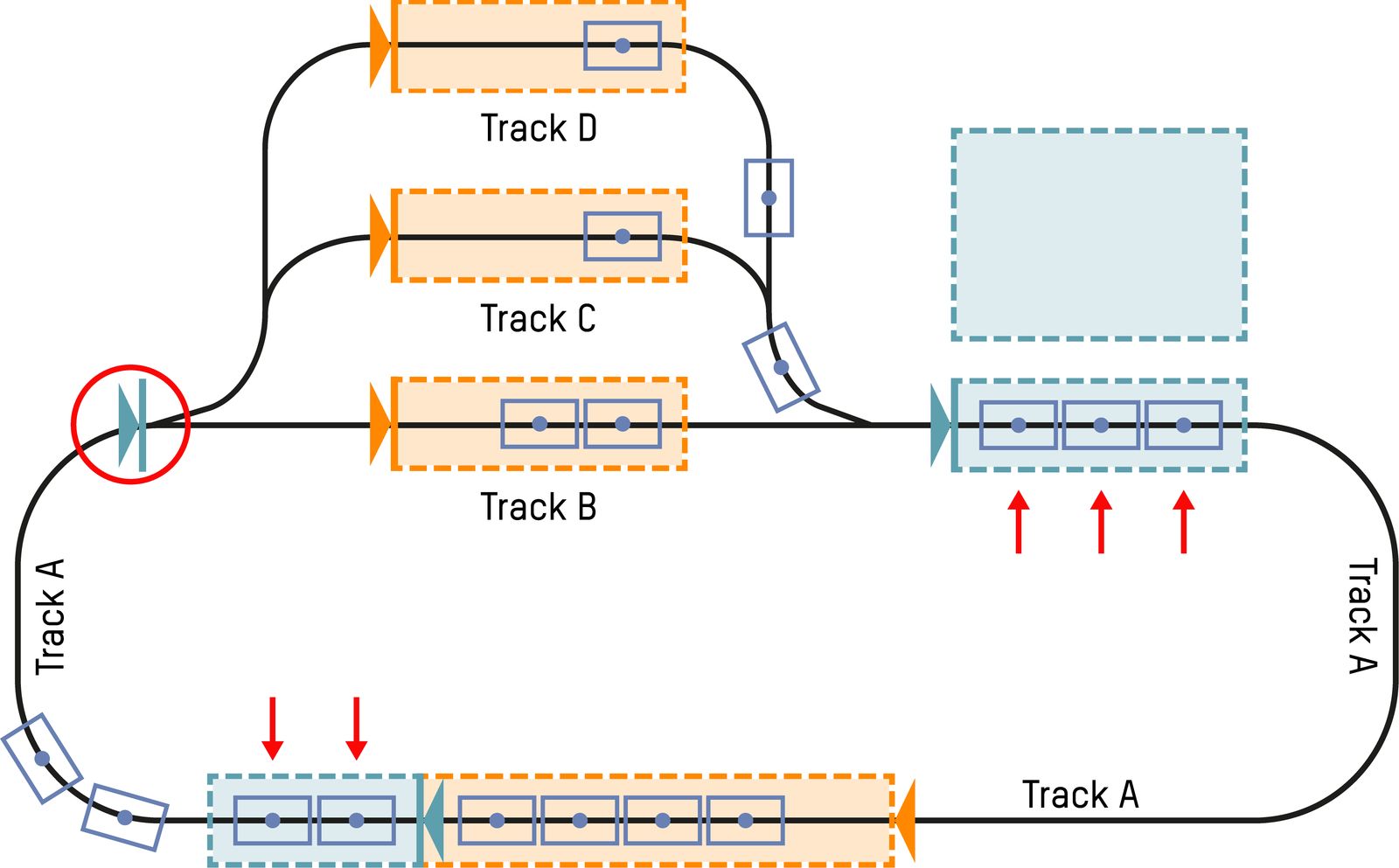
Prozessorientierte Programmierung
Eine zweite Erleichterung im Engineering ist die prozessorientierte Programmierung. Hierbei beschreibt der Applikationssoftware-Ingenieur in mapp Trak Regeln, wie sich die Shuttles am Track verhalten sollen. Die Regeln werden aktiv, wenn Shuttles virtuelle Triggerpunkte am Track passieren. Mit dieser einfachen, an Zustandsautomaten angelehnten Methodik, lassen sich Bewegungsabläufe am Track effizient implementieren. Für ACOPOStrak müssen so keine Achsen und Bewegungsprofile für jedes einzelne Shuttle programmiert werden. Die prozessorientierte Programmierung ermöglicht zudem, dass Shuttles vom Track genommen oder hinzugefügt werden können. Dabei ist es nicht erforderlich, die Applikationssoftware zu verändern.
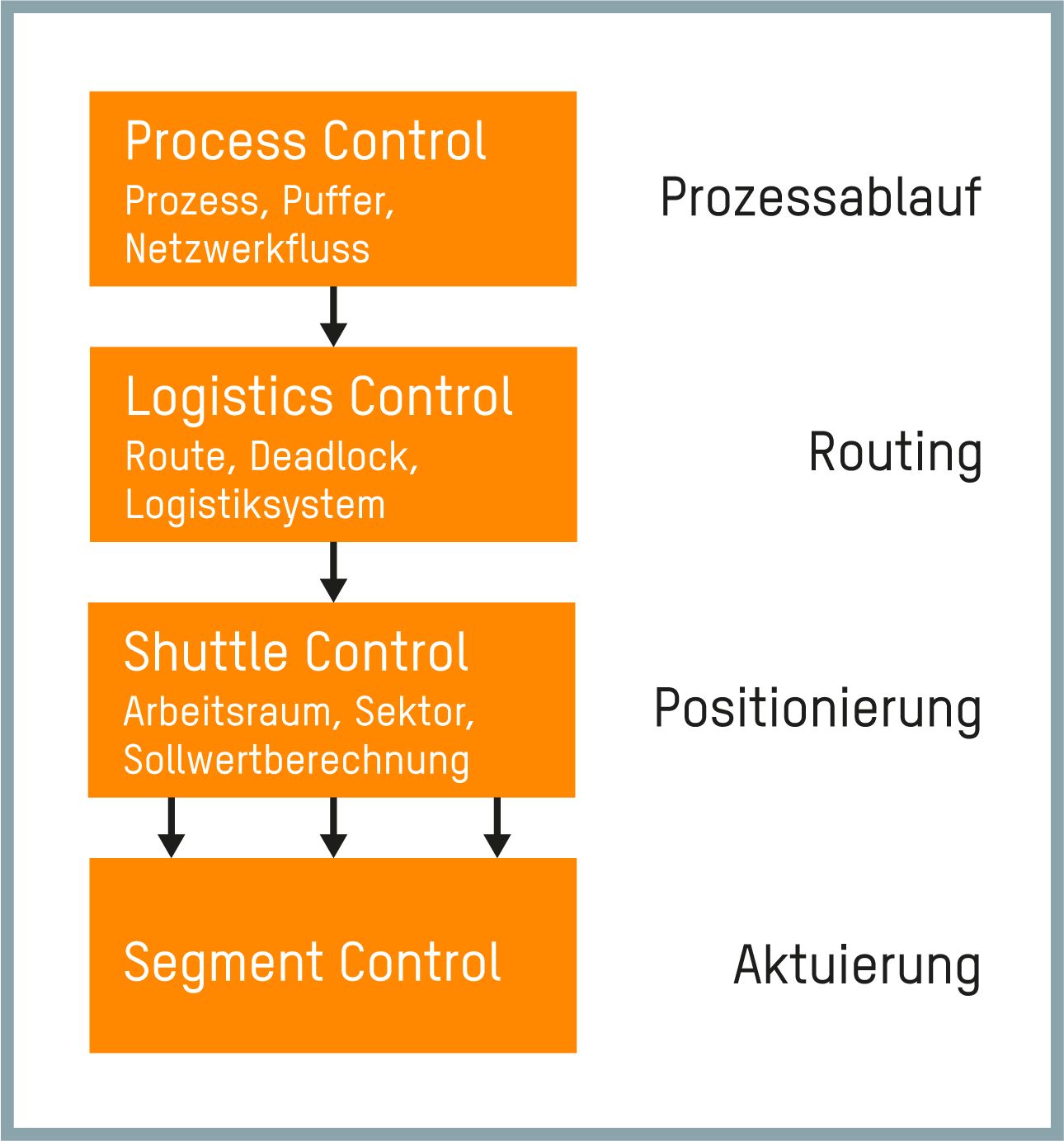
Architektur von mapp Trak
Die Softwarearchitektur von mapp Trak ist in vier grundlegende Ebenen unterteilt. Die unterste, die Segment-Control-Ebene, steuert die Bewegung der Shuttles, die sich auf dem jeweiligen Segment befinden.
In der darüber angeordneten Shuttle-Control-Ebene werden unter anderem Positionssollwerte für die Shuttles berechnet. Will der Applikationsingenieur die Shuttles zum Beispiel über PLC-Funktionsbausteine an eine externe Achse oder an ein anderes Shuttle koppeln, geschieht das auf dieser Ebene. Zudem wird dort abgebildet, wenn ein Shuttle aus dem System entfernt und wieder ins System übernommen wird, wie es zum Beispiel der Fall ist, wenn ACOPOStrak in Kombination mit Förderbändern betrieben wird, oder wenn Shuttles durch Menschen oder Roboter vom Track abgenommen oder wieder aufgesetzt werden.
Auf der dritten sogenannten Logistik-Control-Ebene sorgen Software-Elemente für ein automatisiertes Routing von Verarbeitungsstation zu Verarbeitungsstation.
Die vierte Ebene ist dem Process-Control gewidmet. Diese Ebene stellt auch das Programmier-Interface zur Prozessflussbeschreibung für den Applikationssoftware-Ingenieur dar.
mapp Services gehört zum Software-Paket mapp Technology. Mit den vorkonfigurierten, modularen Software-Bausteinen reduzieren Sie den Programmieraufwand für Ihre Automatisierungssoftware wesentlich. Die intelligenten "mapps" verknüpfen sich automatisch miteinander, sodass diese Programmieraufwände ebenfalls erheblich sinken. Das Portfolio erweitert sich ständig. Erfahren Sie mehr: