Producción sencilla y rápida con ACOPOStrak
El software del sistema mapp Trak simplifica el desarrollo de aplicaciones para el sistema de seguimiento ACOPOStrak y optimiza el tiempo de comercialización de nuevos productos. Impide que las lanzaderas colisionen, crucen las barreras virtuales o violen los límites de velocidad configurables.
Aumente su productividad

Ahorre tiempo y dinero
mapp Trak facilita el trabajo con los sistemas de track inteligentes. El software del sistema le ayuda a sacar nuevos productos al mercado con mayor rapidez y un atractivo retorno de la inversión.

Programar una pista nunca ha sido tan fácil
Con mapp Trak, la aplicación del sistema de pistas se crea utilizando una programación orientada en función de los procesos. Basta con definir las reglas de comportamiento de las lanzaderas en la pista.

Utilice el poder de la simulación
Con las opciones de simulación integradas en mapp Trak, puede probar el número y la velocidad óptimos de las lanzaderas para maximizar la productividad.

Benefíciese del cumplimiento de las normas de control de la FDA
mapp Trak vincula los datos del producto con las lanzaderas correspondientes y, de este modo, hace que todo el proceso de fabricación sea completamente rastreable.
De una pista rápida a un Trak rápido
La arquitectura altamente escalable de ACOPOStrak permite trazados con longitudes de vía superiores a 100 metros y equipados con cientos de lanzaderas. Sin embargo, incluso en las configuraciones más complejas, mapp Trak facilita el trabajo con el sistema.
Colisión imposible
mapp Trak ofrece funciones clave de ACOPOStrak desde el primer momento, como la prevención de colisiones, la división y fusión de flujos de productos a toda velocidad y el cálculo de rutas óptimas. Al no tener que preocuparse por estas tareas, los desarrolladores de aplicaciones se ahorran un valioso tiempo de ingeniería. Incluso con productos de diferentes tamaños y pesos, no se producen colisiones. El tamaño del producto puede configurarse manualmente o medirse con sensores, y mapp Trak ajusta automáticamente los controles de la lanzadera para evitar colisiones.
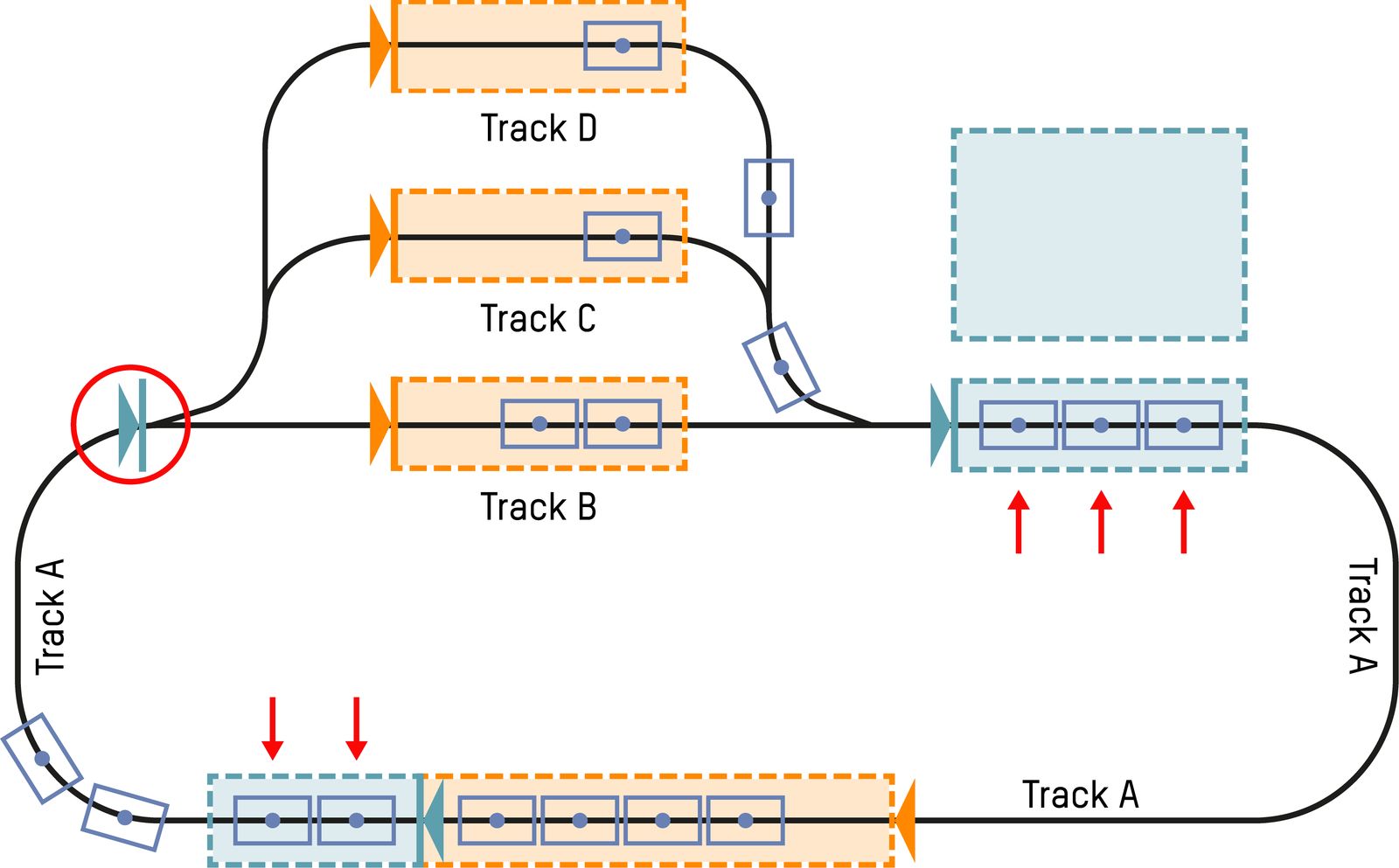
Programación orientada en función de los procesos
Un segundo factor que simplifica notablemente el proceso de ingeniería es la programación orientada en función de los procesos. Con mapp Trak, el ingeniero de software de la aplicación describe las reglas de comportamiento de las lanzaderas en la pista. Las reglas se activan cuando las lanzaderas pasan por puntos de activación virtuales. Esta sencilla metodología basada en máquinas de estados hace que la implementación de secuencias de movimiento sea extremadamente eficiente. Con ACOPOStrak, no es necesario programar ejes y perfiles de movimiento para cada lanzadera individualmente. Otra ventaja de la programación orientada a procesos es que las lanzaderas pueden retirarse de la vía o añadirse sin necesidad de modificar el software de aplicación.
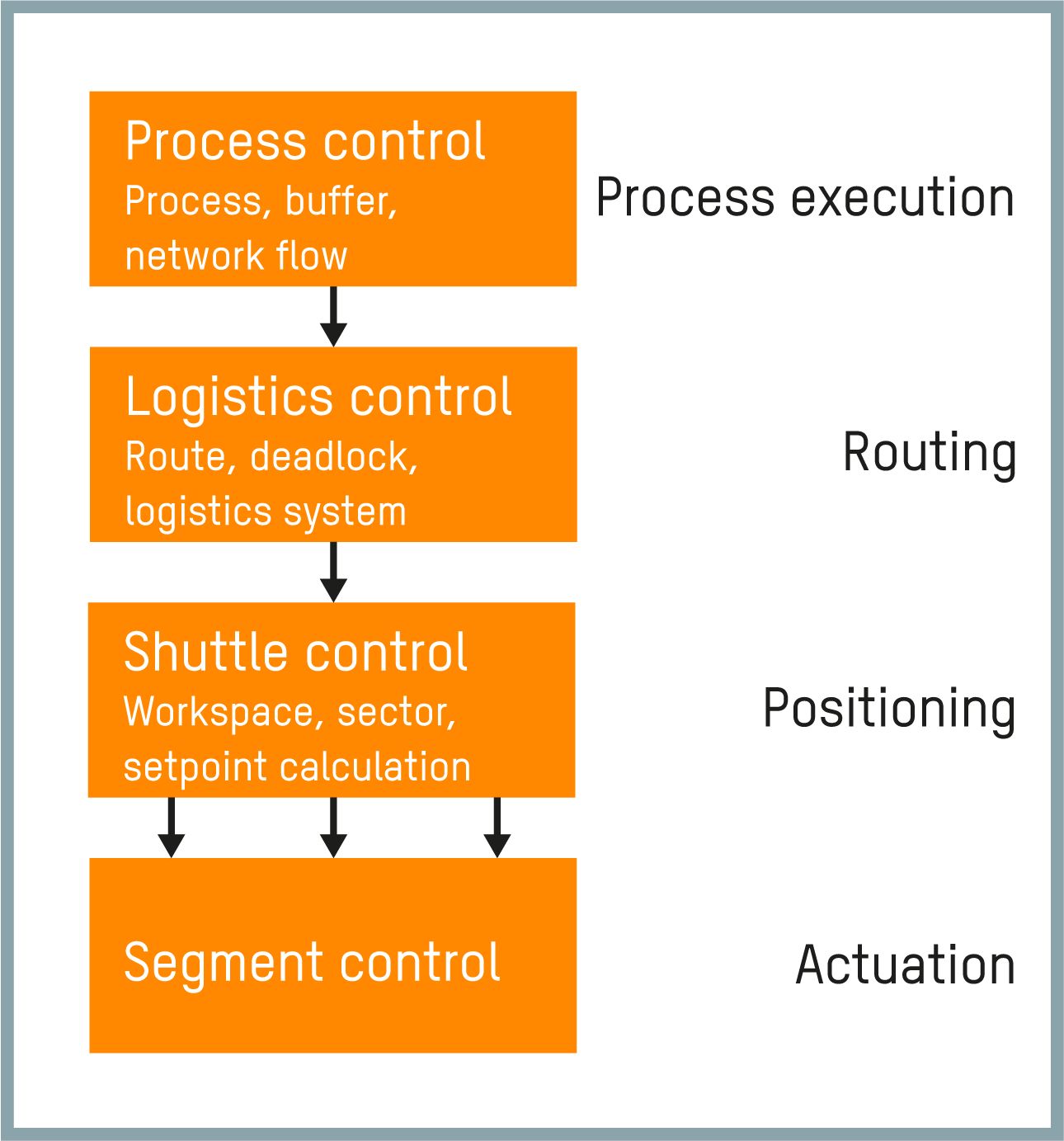
La arquitectura de mapp Trak
La arquitectura de software de mapp Trak se divide en cuatro niveles básicos. El más bajo, el nivel de control de segmento, controla el movimiento de las lanzaderas ubicadas en el segmento respectivo.
La siguiente capa superior, el nivel de control de la lanzadera, es donde se calculan aspectos como los puntos de ajuste de posición para las lanzaderas. Si el ingeniero de sistemas desea acoplar las lanzaderas a un eje externo o a otra lanzadera, por ejemplo utilizando bloques de funciones PLC, se produce en este nivel. Este es también el nivel en el que se manejan las lanzaderas que se añaden y se retiran de la pista, por ejemplo cuando se utiliza ACOPOStrak en combinación con cintas transportadoras convencionales, o si los operarios o los robots añaden y retiran lanzaderas.
Los elementos de software del tercer nivel, el control de la logística, proporcionan un enrutamiento automatizado desde una estación de procesamiento a otra.
El cuarto nivel está dedicado al control de procesos. Este nivel también representa la interfaz de programación para que el ingeniero de software describa el flujo del proceso.
mapp Services forma parte de la estructura del software mapp Technology. Los componentes de software modulares y preprogramados, conocidos como "mapas", reducen notablemente el tiempo y el coste de desarrollo del software de automatización. Los mapas inteligentes se comunican entre sí de forma automática, reduciendo aún más la programación necesaria. La amplia gama de productos mapp no deja de crecer. Más información:
Descripción general de la tecnología mapp
