智能输送系统具有独立控制的穿梭车,为批次为1的大规模生产铺平了道路。然而,真正实现它的必由之路,还要看你是否能够通过使用智能化系统软件来大幅降低为穿梭车运动编程的开发成本 – 就像贝加莱的mapp Trak。
带有个人风格的产品不仅仅令人过目难忘,还唤醒了消费者对拥有它们所具有的强烈愿望。越来越多的制造商希望通过为自己的工厂装备智能化、基于轨道的输送系统来确保其占有大规模定制的利润份额。然而,只有当轨道系统足够柔性,可以快速、经济地适应产品变体或全新产品时,大规模定制才会变得有利可图。

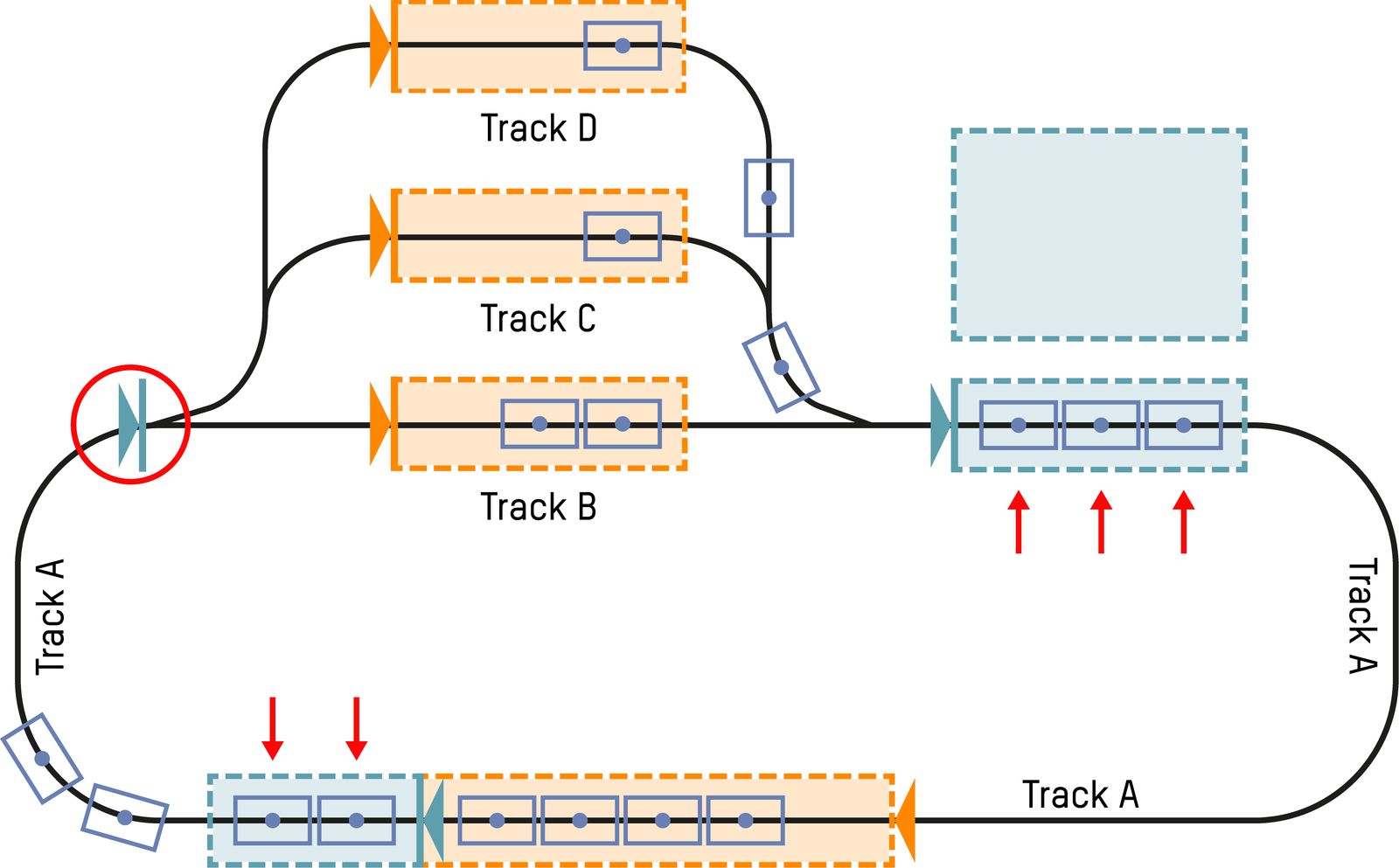
贝加莱的智能型ACOPOStrak输送系统正是如此。该系统采用模块化结构 – 具有四种基本轨道元件和转向器,可以实现几乎任意布局,并能随时轻松调整或扩展。电磁驱动的穿梭车可以进行独立控制 – 即使位于转向器两侧中的任意一侧。
高度可扩展的系统架构有利于实现轨道长度超过100米、由数百个穿梭车构成的布局。然而:“尽管轨道系统很复杂,但它却很容易处理,”贝加莱机电一体化技术经理Robert Kickinger解释道。贝加莱已经简化了ACOPOStrak解决方案的工程过程,以帮助机械制造商和制造企业尽快将其产品推向市场。“当你最大限度地减少了工程工作量及相关成本时,你也就获得了诱人的投资回报,”Kickinger补充道。
不可能发生碰撞
为此,OEM厂商或机器运营商需要的正是ACOPOStrak系统附带的mapp Trak系统软件。“该软件是我们开发大师的杰作,”这位机电一体化专家解释道。他们掌握了ACOPOStrak关键功能背后的复杂数学任务,包括避免碰撞、全速实现产品分流与汇流以及计算最佳路线。
由于不必担心这些任务,因此应用开发人员可以节省下宝贵的工程时间。即使产品的尺寸和重量不同,也不会发生碰撞。产品尺寸可以手动配置或使用传感器进行测量,mapp Trak会自动调整穿梭车控制以防发生碰撞。
面向过程编程
面向过程编程是大幅简化工程过程的第二个因素。通过mapp Trak,应用软件工程师可以描述穿梭车在轨道上的行为规则。当穿梭车通过虚拟触发点时,就会激活规则。这种基于状态机的简单方法可以非常有效地实现运动序列。
使用ACOPOStrak,无需为每个穿梭车的轴和运动曲线单独编程 –
在数百个穿梭车和许多可能路线的情况下,这是一项极其耗时的任务。
面向过程编程的另一个好处是,无论是从轨道上卸下还是装上穿梭车,都无需对应用软件进行任何更改。
仿真确保高效运行
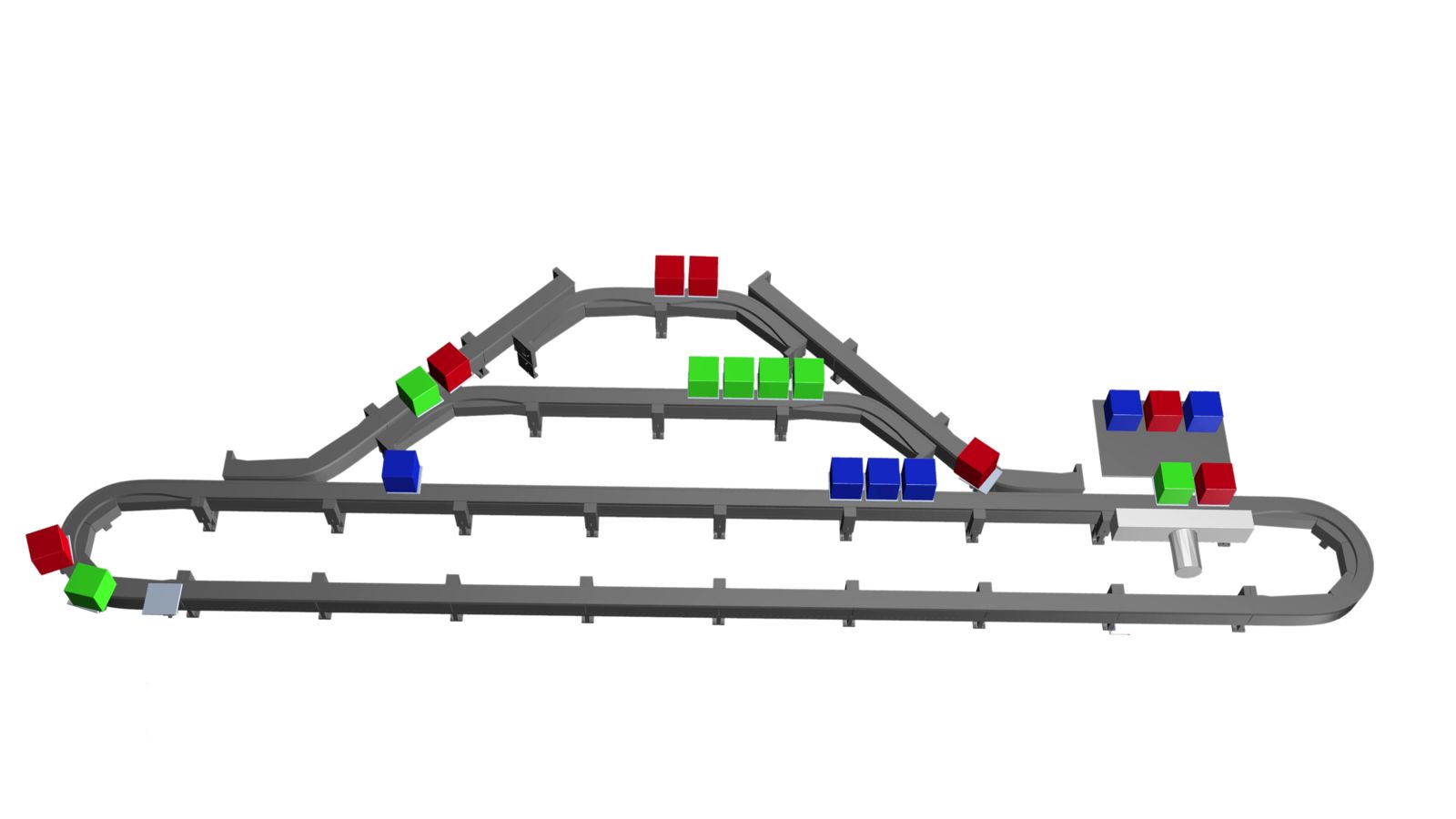
集成在mapp Trak中的仿真功能提供了清晰的视觉确认,将确保系统顺利运行。开发人员可以对应用程序进行测试,以确定使用多少穿梭车以何种速度将能提供最高生产率。“他们可以在自己的商用PC上进行许多场景的测试,不会受到实际系统的限制并承担风险,”贝加莱轨道系统项目经理Davide Migliorisi说道。在开发人员办公室内的计算机上运行的软件与稍后在控制器上使用的系统软件是相同的。这样就可以随时在仿真与实际操作之间来回切换。
贝加莱的Scene Viewer工具还可以用来显示穿梭车是如何与其它机械元件进行交互的,例如螺丝刀、贴标机或机器人。你所要做的就是导入相应机器元件的STEP文件,并模拟其随着时间推移在空间中的运动。
这使开发人员不仅可以对轨道,而且还可以对它与其它机器元件的交互进行仿真。“mapp Trak仿真能力的这种实用取向是我们客户非常赞赏的,”Migliorisi证实道。“这种与外部机械元件的交互作用相当显著,”他补充道,“因为ACOPOStrak携带了ACOPOS伺服驱动器系列的基因。”ACOPOS系列具有操作单轴或多轴系统的复杂功能以及针对轴耦合的广泛选项。
因此,通过使用PLCopen命令,穿梭车可以与由ACOPOS伺服驱动器驱动的轴紧密配合,并在Scene Viewer中显示为数字孪生。
最高柔性
客户已经证实了ACOPOStrak易于处理。Kickinger报告说,有一位客户使用ACOPOStrak扩展了现有机器的直线电机部分,在机器恢复运行之前只进行了十五分钟的软件开发工作。这充分彰显了ACOPOStrak独立于硬件的编程概念的优势。
通过mapp Trak系统软件,产品数据可以清楚地链接到相应产品当前所在的穿梭车。“这为您提供了最高程度的柔性,”Kickinger说道。例如,药品生产线上特定产品的数据记录可以包含有效成分的确切组成和唯一的产品ID。还可以存储每个产品通过每个加工工位的日期和时间。这使应用工程师可以轻松地实现符合FDA标准的产品追溯。
复杂性易于管理
mapp Trak可以保证三件事情:穿梭车不会发生碰撞,它们不会穿越虚拟障碍物,它们会遵守可配置的速度限制。凭借这些保证、易于编程和集成仿真,贝加莱使柔性的ACOPOStrak输送系统变得非常易于用户处理。这样还可以快速且经济地实现任意批次的新产品生产。这对于在短时间内赢得新的生产订单是非常关键的方面。
作者: Carmen Klingler-Deiseroth,自由撰稿人
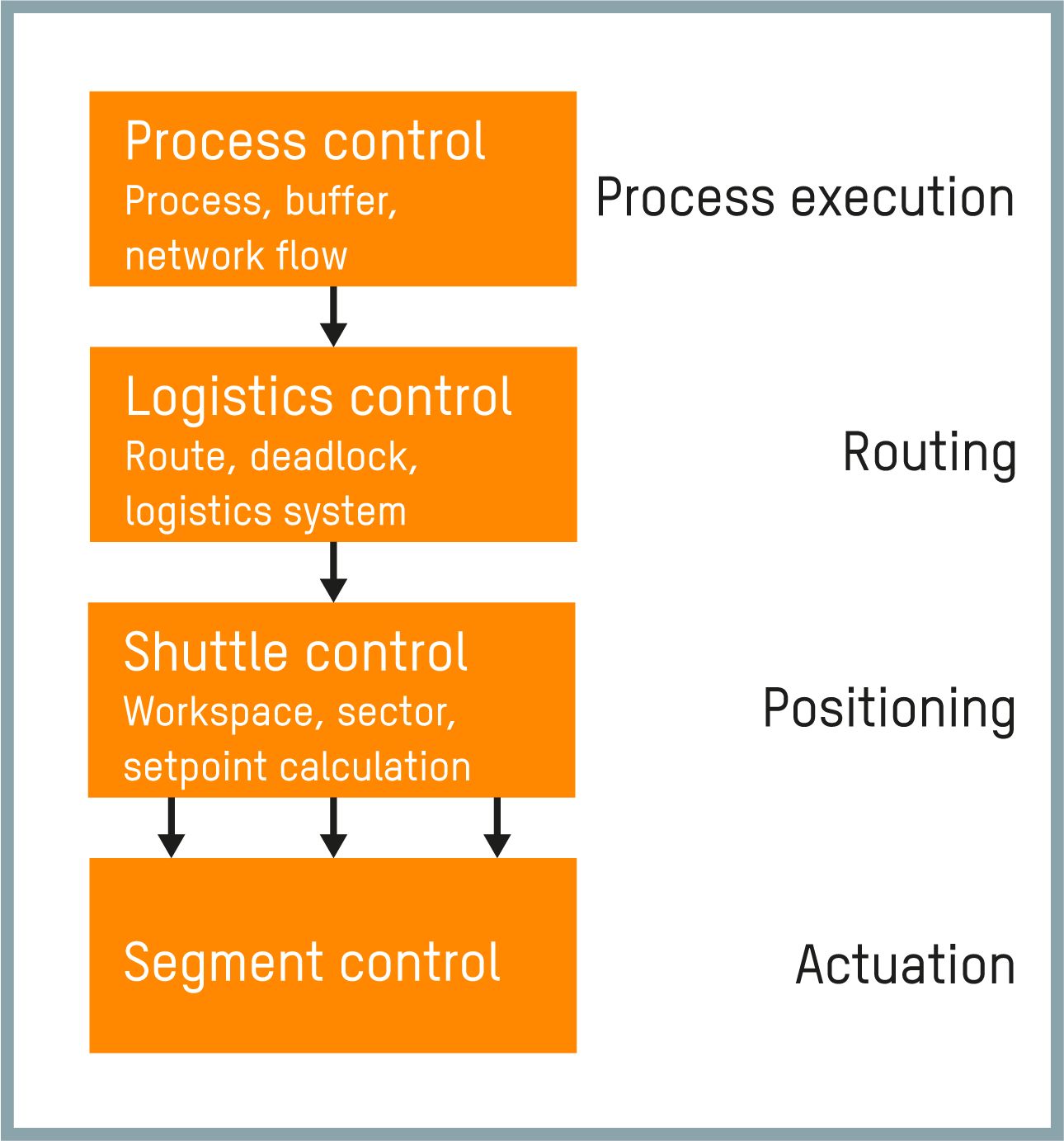
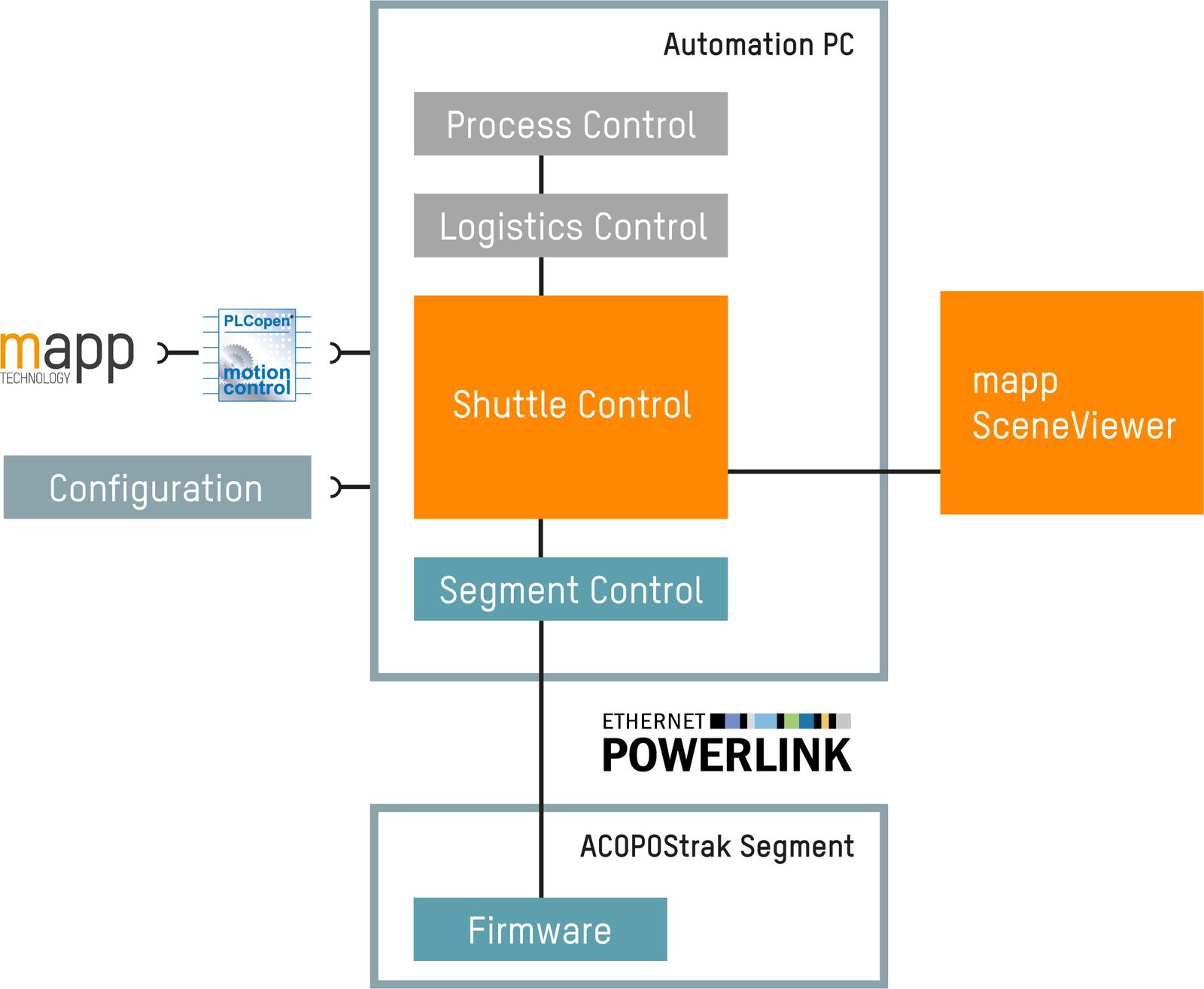
mapp Trak架构
mapp Trak的软件架构分为四个基本层级。最底层即轨道段控制层,用于控制位于相应轨道段上的穿梭车运动。
它上一层是穿梭车控制层,用于计算诸如穿梭车的位置设定点。如果应用工程师想要将穿梭车连接到一个外部轴或另一个穿梭车,例如使用PLC功能块,则会发生在该层级。这也是处理从轨道上卸下和装上穿梭车的层级 – 例如,当ACOPOStrak与传统输送带结合使用或者由人员或机器人卸下和装上穿梭车时。
第三层软件元素是物流控制,它可以提供从一个加工工位到另一个加工工位的自动路线选择。第四层专门用于过程控制。该层级还是软件工程师描述工艺流程的编程接口。