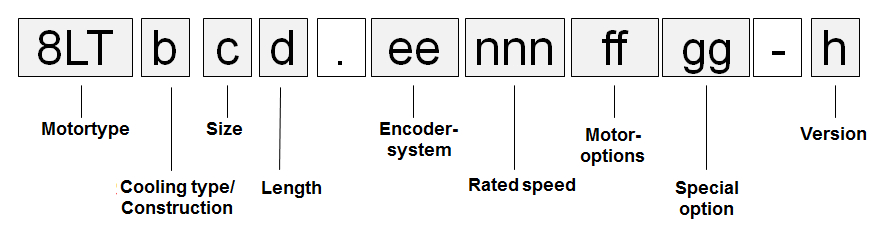
Охлаждение / тип конструкции (b)
Охлаждение / тип конструкции (b)
8LTA– двигатели оснащены самостоятельным охлаждением и выходным фланцем ISO. Двигатели должны монтироваться на охлаждающей поверхности (фланце).
8LTJдвигатели основаны на конструкции с охлаждением типа А и снабжены жидкостным охлаждением. Жидкостное охлаждение увеличивает номинальный вращающий момент (MN), номинальный ток (IN), момент при заторможенном двигателе (M0) и ток при заторможенном двигателе (I0) на 70 % по сравнению с соответствующими двигателями с типом охлаждения А.
8LTQдвигатели оснащены самостоятельным охлаждением и валом с несквозным отверстием. Двигатели должны монтироваться на охлаждающей поверхности (фланце).
8LTSдвигатели основаны на конструкции с охлаждением типа Q и снабжены жидкостным охлаждением. Жидкостное охлаждение увеличивает номинальный вращающий момент (MN), номинальный ток (IN), момент при заторможенном двигателе (M0) и ток при заторможенном двигателе (I0) на 70 % по сравнению с соответствующими двигателями с типом охлаждения Q.
Типоразмер (с)
Типоразмер (с)
Трехфазные синхронные двигатели 8LT поставляются с 9 типоразмером и типом охлаждения C.
Вид охлаждения | Имеется для типоразмера | |
|---|---|---|
9 | C | |
A | Да | Да |
B | Да | --- |
J | Да | Да |
K | Да | --- |
Q | Да | Да |
S | Да | Да |
Длина (d)
Длина (d)
Длина трехфазных синхронных двигателей 8LT может иметь до шести значений. Они имеют различную номинальную мощность при идентичных размерах фланца. Значениям длины соответствует числовой код (d) в номере модели (3, 4, 5, 6, 7, 8).
Длина | Имеется для типоразмера | |
|---|---|---|
9 | C1) | |
3 | Да1) | Да |
4 | Да | Да |
5 | Да | Да |
6 | Да | Да |
7 | Да | Да |
8 | --- | Да |
| 1) | Не для 8LTB/8LTK |
Система энкодера (ee)
Система энкодера (ee)
Энкодеры EnDat
EnDat – стандарт, разработанный в Johannes Heidenhain GmbH, который включает преимущества абсолютного и инкрементального методов измерения позиции, а также имеет память для считывания/записи параметров в энкодере. При абсолютном измерении позиции (абсолютная позиция считывается последовательно) обычно не требуется процедура коррекции исходной позиции. При необходимости следует установить многооборотный энкодер (4096 оборотов). Однооборотный энкодер может также использоваться с выключателем опорных (реперных) точек. В этом случае необходимо выполнить процедуру коррекции исходной позиции. Инкрементальный процесс обладает короткими временами задержки, необходимыми для измерения позиции на приводах с исключительными динамическими характеристиками.
В зависимости от требований могут использоваться различные типы энкодеров EnDat:
Название | Код заказа (ee) | |
|---|---|---|
E6 | E7 | |
Тип энкодера | EnDat, однооборотный | EnDat, многооборотный |
Принцип работы | Оптический | Оптический |
Протокол EnDat | EnDat 2.1 | EnDat 2.1 |
Разрешение | 2048 линий | 2048 линий |
Распознаваемый | --- | 4096 |
Точность | ±20" | ±20" |
Частота среза | ≥ 400 кГц (-3 дБ) | ≥ 400 кГц (-3 дБ) |
Вибрация при эксплуатации | ≤ 150 м/с² (IEC 60 068-2-6) | ≤ 150 м/с² (IEC 60 068-2-6) |
Ударная нагрузка при эксплуатации | ≤ 1000 м/с² (IEC 60 068-2-27) | ≤ 1000 м/с² (IEC 60 068-2-27) |
Изготовитель Интернет-адрес | Dr. Johannes Heidenhain GmbH www.heidenhain.de | |
Код изделия изготовителя | ECN1313 | EQN1325 |
Энкодер EnDat 2.2
Общая информация
Системы дискретных сервоприводов и контуры управления положением с приборами определения позиции для определения измеренных значений требуют быстрой и чрезвычайно безопасной передачи данных от измерительных устройств. Кроме того, должны собираться и другие данные, например специфические характеристики сервопривода, таблицы коррекций и т. д. Чтобы гарантировать высокий уровень безопасности системы, измерительные устройства должны быть интегрированы в процедуры обнаружения ошибок и иметь возможности диагностики.
Интерфейс EnDat от HEIDENHAIN является дискретным, двунаправленным интерфейсом для измерительных устройств. Он способен выдавать значения позиции от инкрементальных и абсолютных измерительных устройств, а также считывать и обновлять информацию на измерительном устройстве или сохранять туда новые данные. В нем используется передача данных в последовательном формате, поэтому необходимы только 4 сигнальные линии. Данные передаются синхронно с сигналом синхронизации, определенным последующей электроникой. Используемый тип передачи (например, значения позиции, параметры, диагностика и т. д.) выбирается с помощью команд режима, посланных в измерительное устройство последующей электроникой.
Технические характеристики
В зависимости от задачи могут использоваться различные энкодеры EnDat 2.2 (однооборотные или многооборотные).
Название | Код заказа (ee) | |
|---|---|---|
D0 | D1 | |
Тип энкодера | EnDat, однооборотный | EnDat, многооборотный |
Принцип работы | Оптический | Оптический |
Протокол EnDat | EnDat 2.2 | EnDat 2.2 |
Значений позиции за оборот | 33 554 432 (25 бит) | 33 554 432 (25 бит) |
Распознаваемые обороты | --- | 4096 |
Точность | ±20" | ±20" |
Вибрация при эксплуатации1) | ≤ 300 м/с2(МЭК 60068-2-6) | ≤ 300 м/с2(МЭК 60 068-2-6) |
Ударная нагрузка при эксплуатации Продолжительность 6 мс | ≤ 1000 м/с2/ ≤ 2000 м/с2(МЭК 60068-2-27) | ≤ 1000 м/с2/ ≤ 2000 м/с2(МЭК 60068-2-27) |
Изготовитель Интернет-адрес | Dr. Johannes Heidenhain GmbH www.heidenhain.de | |
Код изделия изготовителя | ECN 1325 | EQN 1337 |
| 1) | Согласно стандарту при комнатной температуре; следующие значения действительны при рабочей температуре до 100 °C: ≤ 300 м/с2, до 115 °C: ≤ 150 м/с2; 10–55 Гц, постоянное смещение, полный размах 4,9 мм. |
Энкодер EnDat 2.2 – системы измерения позиции с обеспечением безопасности
Общая информация
В производстве установок и систем предмет безопасности становится все более важным. Это отражается в законодательстве и более жестких критериях безопасности в национальных и международных стандартах. Более жесткие требования защищают персонал, собственность и окружающую среду. Целью функциональной безопасности является предельное снижение или исключение опасных ситуаций, которые могут возникнуть в станке и системах, включая или исключая операционные ошибки. Как правило, это достигается путем внедрения резервных систем. Подвижные оси в связанных с безопасностью приложениях требуют наличия информации о позиции для выполнения соответствующих функций безопасности. Реализуя различные системные конфигурации, можно получить независимые значения позиции. Одна из возможностей – использование двух измерительных устройств на одной оси. Чтобы снизить затраты, часто создаются решения только с одним устройством измерения позиции. До сих пор для этого использовались аналоговые измерительные устройства с синусоидальными/косинусоидальными сигналами.
Информацию об области применения и процедуре настройки различных функций безопасности можно найти в Руководстве пользователя "ACOPOSmulti с SafeMC". (Номер модели: MAACPMSAFEMC-GERACOPOSmulti с SafeMC или в загрузочном разделе нашего веб-сайта.)
Технические характеристики
В зависимости от задачи могут использоваться энкодеры EnDat 2.2 с функциональной безопасностью (однооборотные или многооборотные).
Название | Код заказа (ee) | |
|---|---|---|
S0 | S1 | |
Тип энкодера | EnDat, однооборотный, функциональная безопасность | EnDat, многооборотный, функциональная безопасность |
Принцип работы | Оптический | Оптический |
Протокол EnDat | EnDat 2.2 | EnDat 2.2 |
Значений позиции за оборот | 33 554 432 (25 бит) | 33 554 432 (25 бит) |
Распознаваемые обороты | --- | 4096 |
Точность | ±20" | ±20" |
Вибрация при эксплуатации1) | ≤ 300 м/с2(МЭК 60068-2-6) | ≤ 300 м/с2(МЭК 60 068-2-6) |
Ударная нагрузка при эксплуатации Продолжительность 6 мс | ≤ 2000 м/с2(IEC 60 068-2-27) | ≤ 2000 м/с2(IEC 60 068-2-27) |
Изготовитель Интернет-адрес | Dr. Johannes Heidenhain GmbH www.heidenhain.de | |
Код изделия изготовителя | ECN 1325 | EQN 1337 |
| 1) | Согласно стандарту при комнатной температуре; следующие значения действительны при рабочей температуре до 100 °C: ≤ 300 м/с2, до 115 °C: ≤ 150 м/с2; 10–55 Гц, постоянное смещение, полный размах 4,9 мм. |
Номинальная скорость (nnn)
Номинальная скорость (nnn)
Трехфазные синхронные двигатели 8LT могут поставляться с тремя различными скоростями вращения:
Типоразмер | Доступные номинальные угловые скорости nN[об/мин] | |||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
80 / 1001) | 300 | 500 | 1000 | |||||||||||||||||||
9 | --- | --- | --- | --- | --- | --- | Да | Да | Да | Да | Да | --- | Да | Да | Да | Да | Да | Да | Да | Да | Да | Да |
C1) | Да | Да | Да | Да | Да | Да | Да | Да | Да | Да | Да | Да | Да | Да | Да | Да | Да | --- | --- | --- | --- | --- |
Длина | 3 | 4 | 5 | 6 | 7 | 8 | 31) | 4 | 5 | 6 | 7 | 8 | 31) | 4 | 5 | 6 | 7 | 31) | 4 | 5 | 6 | 7 |
| 1) | Не для 8LTB/8LTK |
Сальник (ff)
Сальник (ff)
Все трехфазные синхронные двигатели 8LT поставляются с опциональным сальником формы А согласно DIN 3760. Снабженные сальником двигатели имеют защиту IP65 согласно EN 60034-5.
На протяжении всего срока службы двигателя должна быть обеспечена надлежащая смазка сальника.
Специальные варианты конструкции двигателя (gg)
Специальные варианты конструкции двигателя (gg)
00...Двигатель без специальных характеристик
Версия двигателя (h)
Версия двигателя (h)
Версия двигателя автоматически указывается конфигуратором; ее можно видеть в технических данных.
Код заказа для вариантов конструкции двигателя (ff)
Соответствующая группа (ff) для кода заказа приведена в следующей таблице:
Варианты конструкции двигателя | |||
|---|---|---|---|
Конец вала | Направление соединения | Сальник | Группа в коде заказа (ff) |
Фланец ISO / несквозное отверстие / полый вал | Разъемы двигателя и энкодера – угловые (шарнирные) | Нет | F0 |
Да | F3 | ||
Разъем двигателя – прямой, разъем энкодера – шарнирный (угловой) | Нет | F6 | |
Да | F9 | ||
Пример заказа 1
Пример заказа 1
Для приложения был выбран высокомоментный электродвигатель типа8LSA45с номинальной частотой вращения 300 об/мин. Двигатель должен иметь однооборотный энкодер EnDat на 2048 линий. И двигатель, и энкодер должны иметь шарнирные разъемы.
В поле кодовой группы (ee) для системы энкодеров следует ввестиE6.
Кодом (nnn) для номинальной частоты вращения 300 об/минявляется003.
Код (ff) для других опций (направление соединения) –F0.
Номер модели для требуемого двигателя имеет следующий вид8LTA93.E6003F000-0
Пример заказа 2
Пример заказа 2
Для приложения был выбран трехфазный синхронный двигатель типа8LTJ97с номинальной частотой вращения 500 об/мин. Двигатель должен иметь сальник и многооборотный энкодер EnDat на 2048 линий. Штекер двигателя должен иметь прямое соединение. Штекер энкодера должен иметь шарнирное (угловое) соединение.
В поле кодовой группы (ee) для системы энкодеров следует ввестиE7.
Кодом (nnn) для номинальной частоты вращения 500 об/минявляется005.
В поле кодовой группы (ff) для других опций (сальник и направление соединения) вводитсяF9.
Номер модели для требуемого двигателя имеет следующий вид8LTJ97.E7005F900-0