Приложения функциональной безопасности для привода можно легко создать с использованием PLCopen-совместимых функциональных блоков от B&R с помощью инструмента SafeDESIGNER в среде разработки Automation Studio.
Таким образом можно реализовать уровень безопасности до класса Cat. 4 / PL e / SIL 3.
Передача данных безопасности через существующую системную шину полностью заменяет дополнительное физическое соединение с оборудованием. Гибко конфигурируемый или программируемый режим обеспечения безопасности оптимально адаптируется под различные ситуации.
Поддержка обобщенных последовательных кинематических цепей позволяет определить любой тип последовательной кинематической цепи и настроить соответствующие функции безопасности. Блоки диагностики помогают при проверке приложения безопасности.
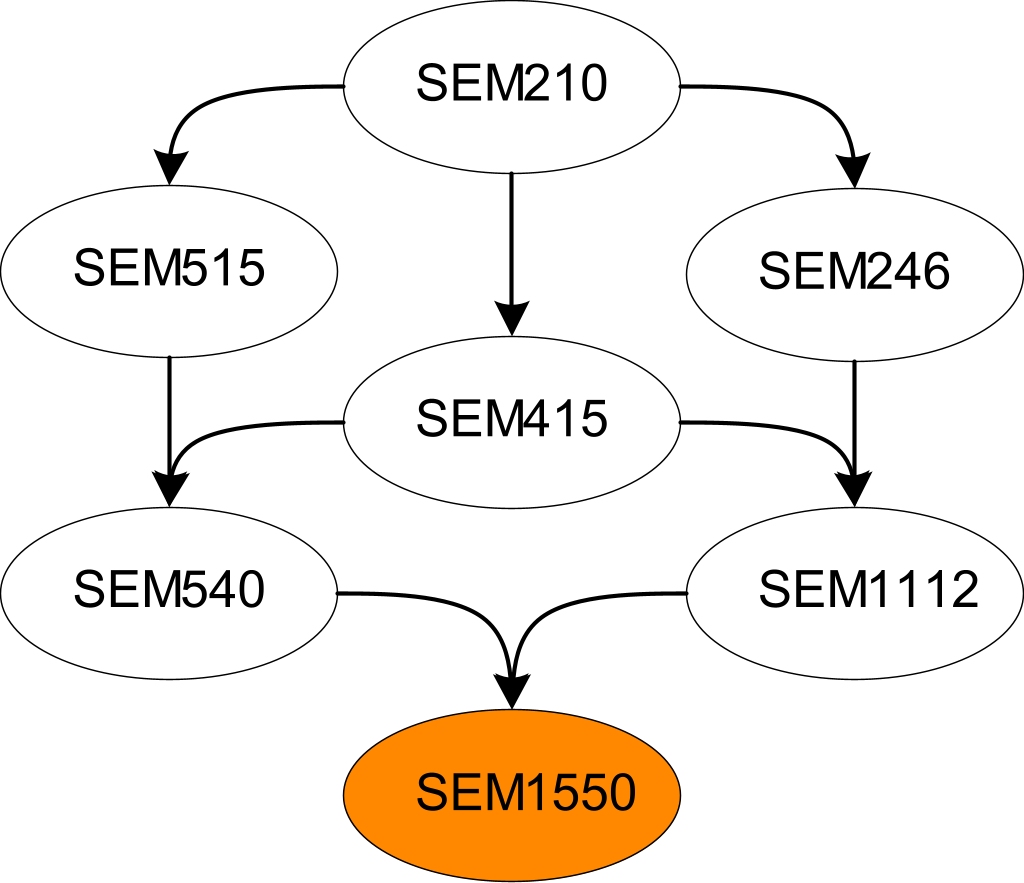
Предпосылки и требования | Продолжительность | Артикул | |
|---|---|---|---|
Семинар Обучение Automation Studio: Основы Семинар Automation Studio Training: Integrierte Sicherheitstechnik mit mapp Safety [SEM515.2] Семинар Семинар по Automation Studio: IEC 61131-3 Программирование на языке структурированного текста ST Семинар Учебный курс: Интегрированное управление движением - mapp Axis [SEM415.3] Семинар Учебный курс: Интегрированное безопасное управление движением [SEM540.2] Семинар Учебный курс: Робототехника - mapp Robotics [SEM1112.2] | 2 дня | SEM1550.2 |  |
Содержание и цели обучения
- Настройка последовательной кинематической цепи
- Определение аппаратного интерфейса
- Работа с функциями безопасности
- SafeROBOTICS Безопасное ограничение скорости (Safely Limited Speed)
- SafeROBOTICS Безопасная ограниченная позиция (Safely Limited Position)
- SafeROBOTICS Безопасно ограниченная ориентация (Safely Limited Orientation)
- Проверка функций безопасности с помощью диагностических блоков
В зоне ответственности
- Участники научатся создавать программное обеспечение, используемое для выполнения программ робота в системе управления.
- Научатся настраивать рабочее пространство для безопасного ограниченного движения робота.
- Научатся создавать приложения безопасности для робототехнических систем
- Научатся проверять функции безопасности робототехнических систем.
